
ANZINE : CAE 기술 매거진
이전 ANZINE Home Tech-Insight



Ansys Motion을 활용한 Inverse PSD 사용방법 소개
- 손영진 매니저
- 태성에스엔이
- yjson@tsne.co.kr
Ansys Motion을 활용한 Inverse PSD 사용방법 소개
1. Introduction

[그림 1] Effect of Nonlinear Contact Conditions on Structural Stress
2. PSD vs Inverse PSD
3. Ansys Motion™ Inverse PSD 기능 특징
4. Analysis Process
A. Get Ready
- ‘INVPSD.dll’ 파일 내부에 PSD에서 Inverse PSD로 변환하는 Solver가 탑재되어 있다. Inverse PSD는 기본 기능이 아니라 User Subroutine 방식이므로 dll 파일이 Solver 경로에 없으면 실행이 불가능하여 해석 전 반드시 파일을 넣는 작업을 진행해야 한다.
- 경로 (c:\Program Files\ANSYS Inc\v251\Motion\Solver\Console)
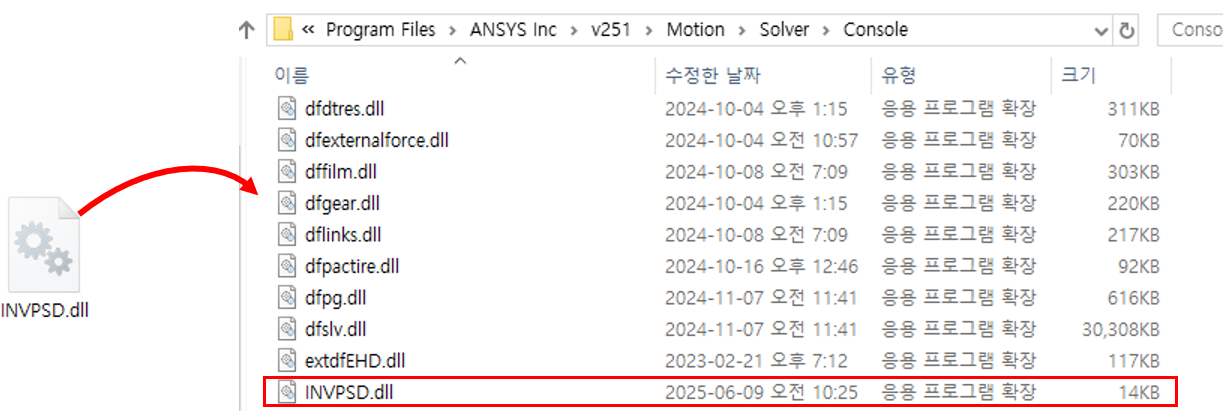 [그림 2] Inverse PSD Solver File Setup
[그림 2] Inverse PSD Solver File Setup
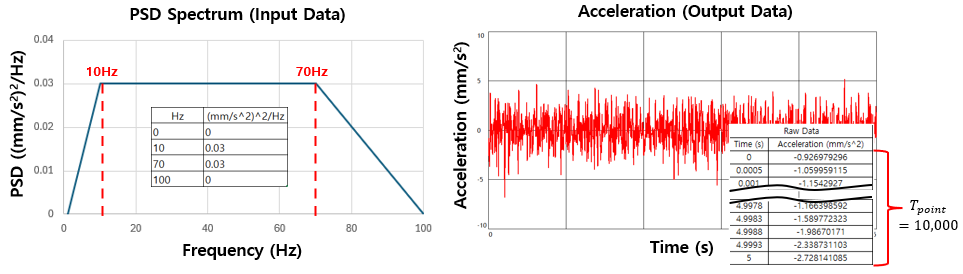
B. PSD Spline 데이터 생성
- PSD 입력 데이터를 Spline 데이터로 입력해야 한다. 이후에 Inverse PSD 함수의 입력 데이터 역할을 할 것이고 주파수 범위 설정이 중요하다.
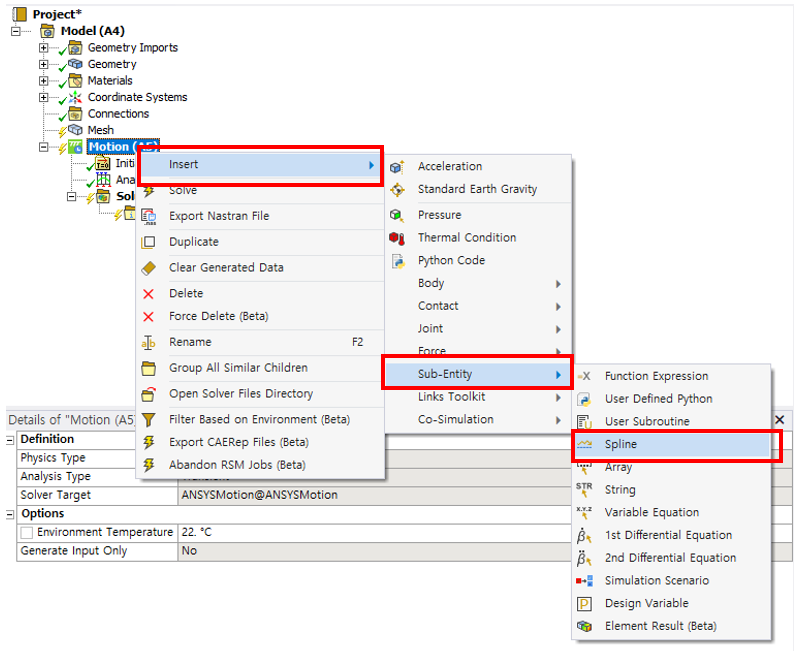
[그림 3] Procedure for Creating a Spline Data
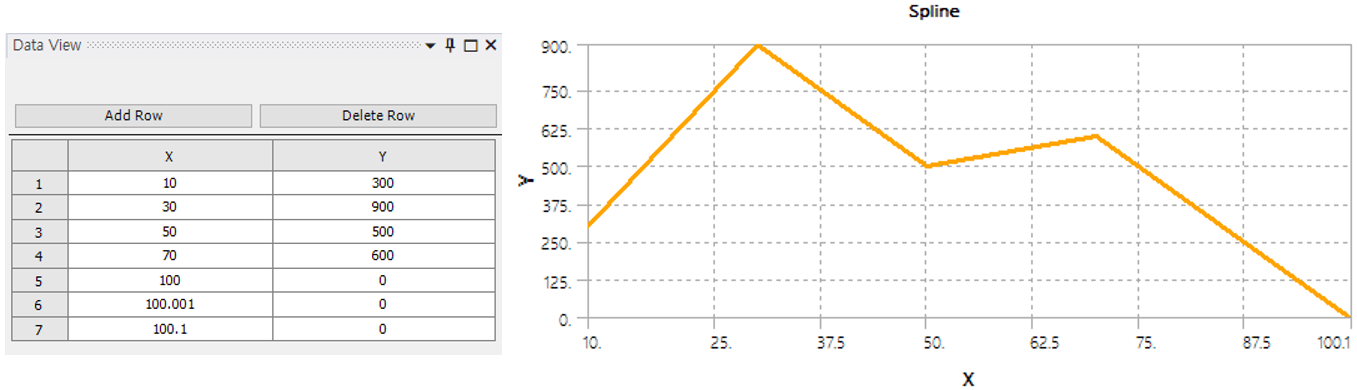
[그림 4] Tabular Input Data and Resulting Spline Curve
C. User Subroutine 생성
- 초기에 설정한 INVPSD.dll 파일을 Motion과 연동하는 단계이다. 해당 과정에서는 INVPSD 함수를 호출하여 입력된 PSD 데이터를 시간 영역 신호로 변환한다. 입력한 PSD Spline 데이터는 User Subroutine을 통해 계산되며, 그 결과 시간 도메인의 가속도 데이터로 생성된다.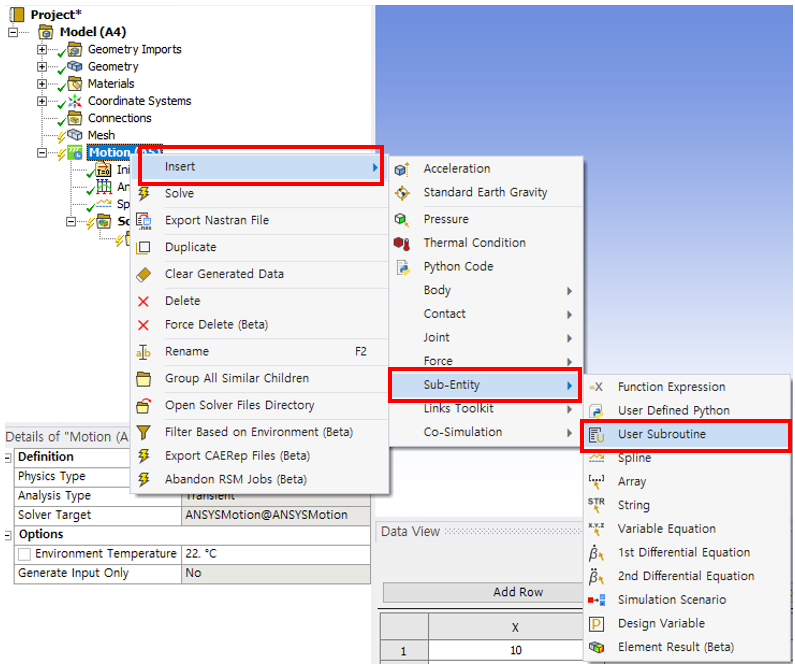
[그림 5] Procedure for Creating a User Subroutine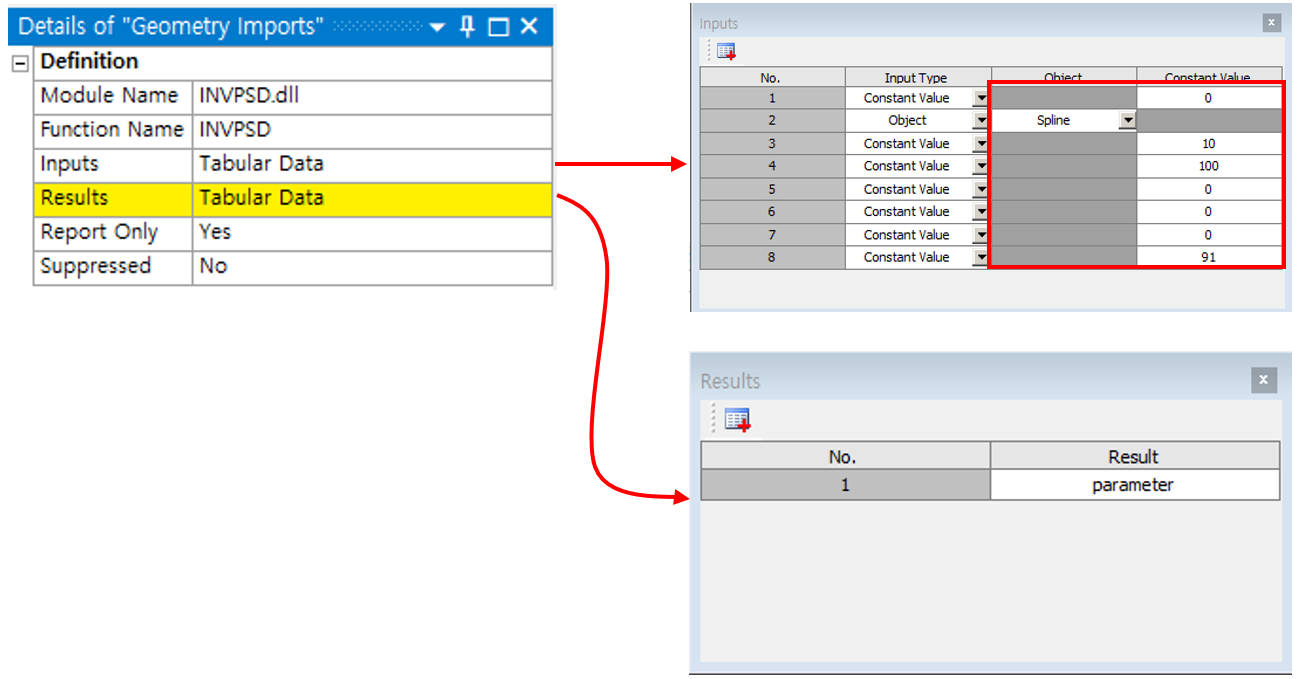 [그림 6] INVPSD User Subroutine Input Setting
[그림 6] INVPSD User Subroutine Input Setting
- 아래 표 1과 같이 User Subroutine 기능 내에는 지연 시간, 주파수 범위, 위상 옵션 등 주요 파라미터를 설정한다. 각 파라미터는 PSD Spline 데이터와 함께 시간 도메인의 가속도 신호 생성에 필요한 조건들이다.
|
No |
Unit |
의미 |
|
1 |
Sec |
가진 시작 전 지연시간 |
|
2 |
- |
PSD의 Spline data |
|
3 |
Hz |
PSD 최소 주파수 |
|
4 |
Hz |
PSD 최대 주파수 |
|
5 |
- |
Phase Option (Random - 0, Constant - 1) |
|
6 |
- |
주파수 샘플링 |
|
7 |
Degree |
Constant 값 사용시 사용할 위상 |
|
8 |
- |
사용하고자 하는 주파수 샘플링 개수 파악 |
[표 1] INVPSD User Subroutine Input Setting
D. 2nd Differential Equation 생성
- INVPSD를 거쳐 User Subroutine 기능을 통해 시간 영역의 가속도 데이터가 도출된다. 2nd Differential Equation은 두 번 미분한 가속도 데이터를 불러오는 작업을 한다.
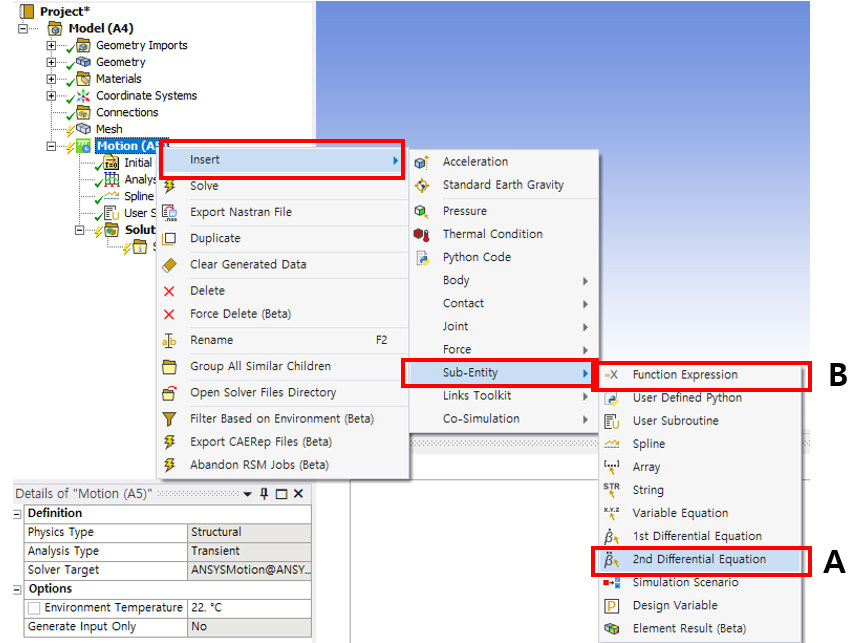
[그림 7] Procedure for Creating a 2nd Differential Equation
- Joint에 적용시키기 위해 Function Expression을 생성하고 2nd Differential Equation을 불러온다. 그 후에 DIF20 함수를 활용하여 2번 적분된 변위 값을 생성한다.
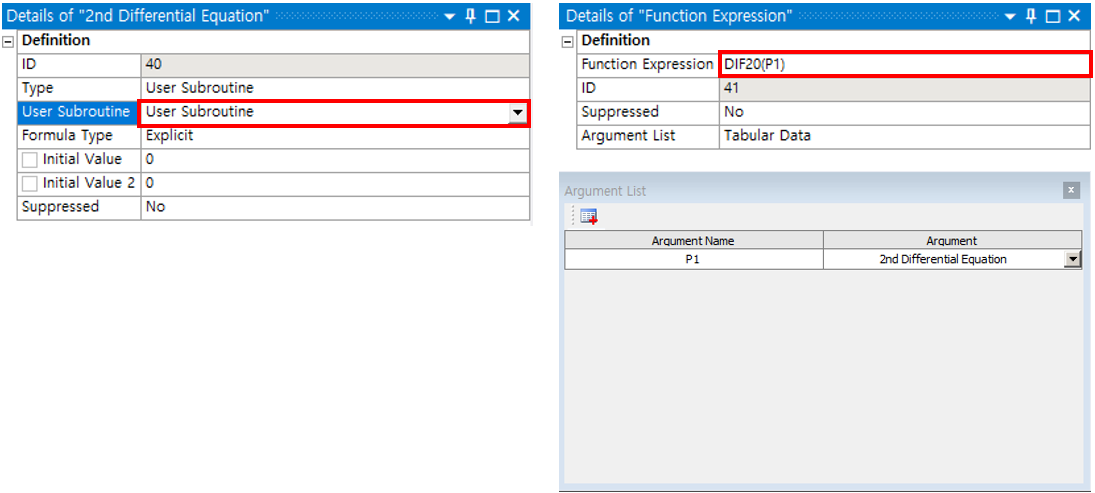
[그림 8] 2nd Differential Equation/Function Expression Setting
E. Joint 생성
- Function Expression에서 도출한 변위 신호를 실제 모델에 적용하기 위한 과정이다. Joint는 Translational Joint를 생성하고 Reference와 Mobile Scope은 각각 Ground와 Model 조건으로 생성한다.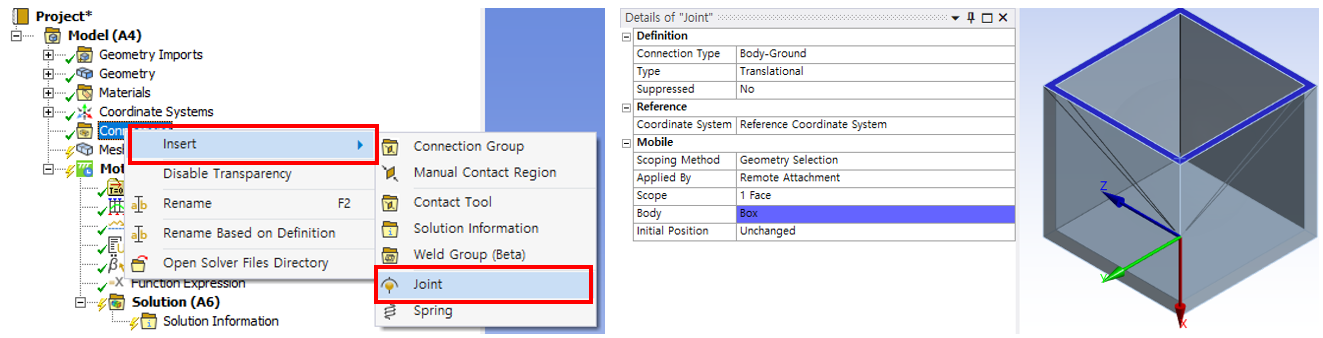
[그림 9] Procedure for Defining a Translational Joint
- 생성한 Translational Joint에 앞서 정의한 변위 데이터를 하중 조건으로 적용한다.
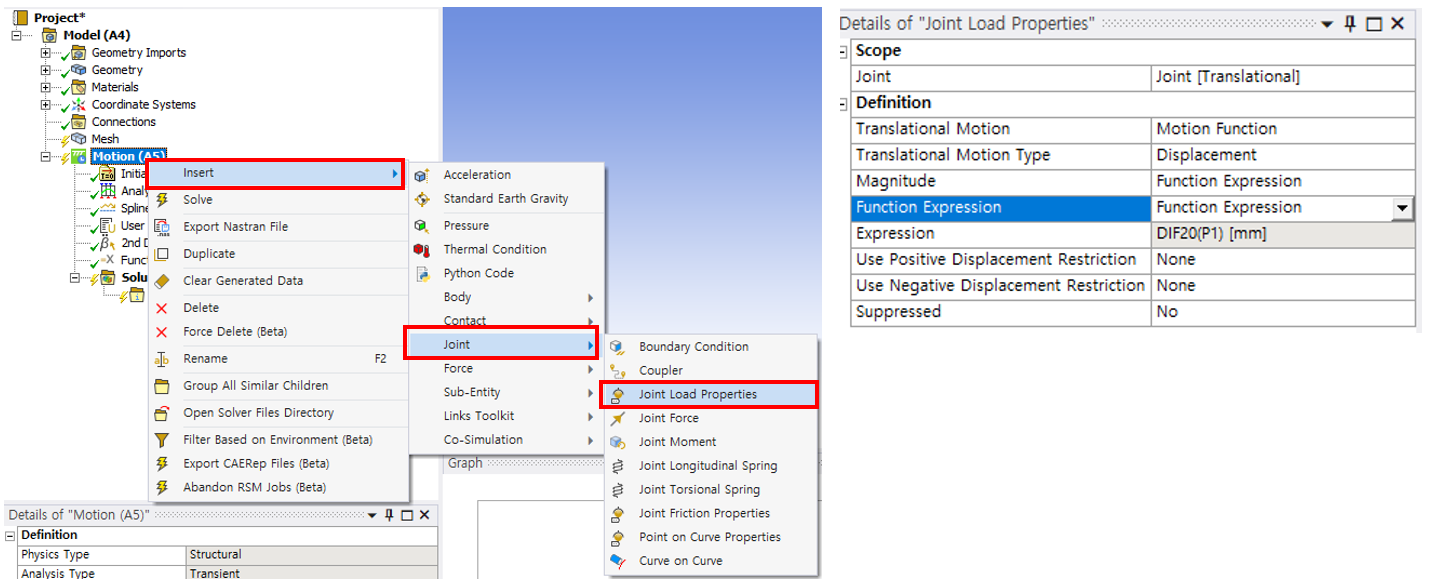
[그림 10] Procedure for Defining a Joint Load
F. Analysis Setting
- 입력 신호의 주파수는 최대 100 Hz이므로, 최대 주파수 성분을 충분히 재현하기 위해 1초 해석에 대해 1000 Output Step으로 설정하였다. 이는 100 Hz 신호의 한 주기를 최소 10개 이상 데이터로 분해하여 시간 영역 응답을 정확하게 도출하기 위함이다.
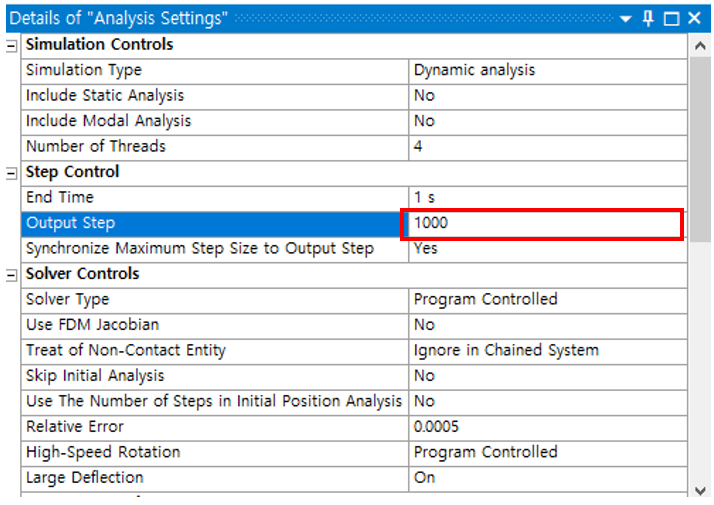
[그림 11] Analysis Setting
5. Inverse PSD 기능 신뢰성 테스트
PSD는 주파수 영역 데이터이며, Inverse PSD로 생성된 가속도는 시간 영역 데이터이므로 직접적인 비교에는 한계가 있다. 이에 따라 Parseval’s Theorem을 적용하여 시간 영역과 주파수 영역에서의 에너지가 동일하다는 성질을 이용하였고, 이를 기반으로 RMS 값을 산출하여 두 결과를 비교하였다.
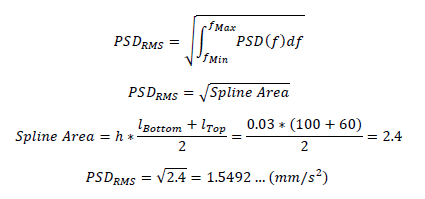
A. 입력 신호 PSD 데이터 RMS 값
B. 출력 신호 가속도 데이터의 RMS 값
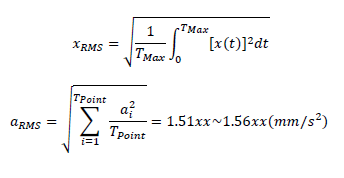
- Parseval’s Theorem을 통해 서로 다른 영역인 데이터를 RMS 값으로 결과를 도출한 결과 약 1.54 mm/s^2 로 같은 결과가 도출되었다.
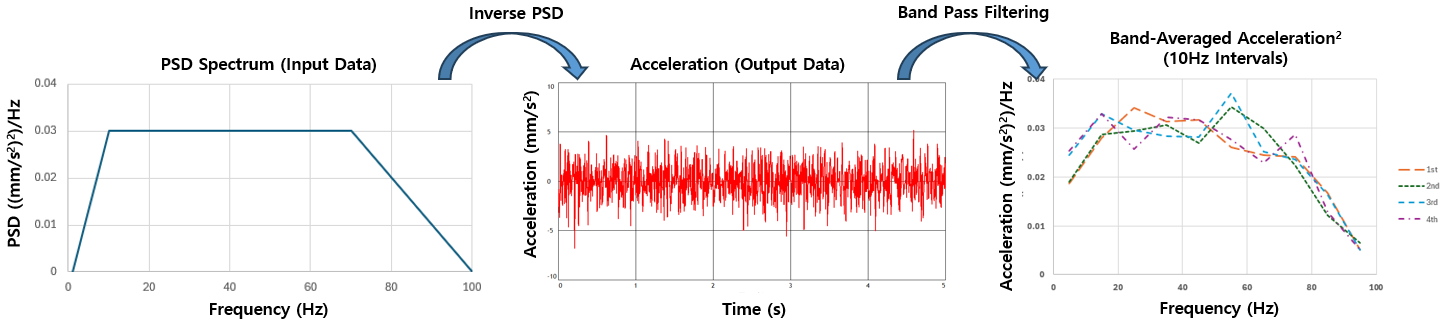
Inverse PSD 기능으로 도출한 가속도 데이터를 PSD로 변환했을 때 유사하게 그려지는지 확인하는 과정을 정리하였다. 첫 번째는 가속도 Raw Data를 Band Pass Filtering 기능을 통해 10 Hz 단위로 분할 작업을 진행하였고 두 번째는 총 10개의 가속도 데이터를 각각 제곱 후 평균 값을 도출하였다. 그리고 세 번째는 평균 값을 10 Hz 단위만큼 나눠서 PSD 데이터로 변환하였다.
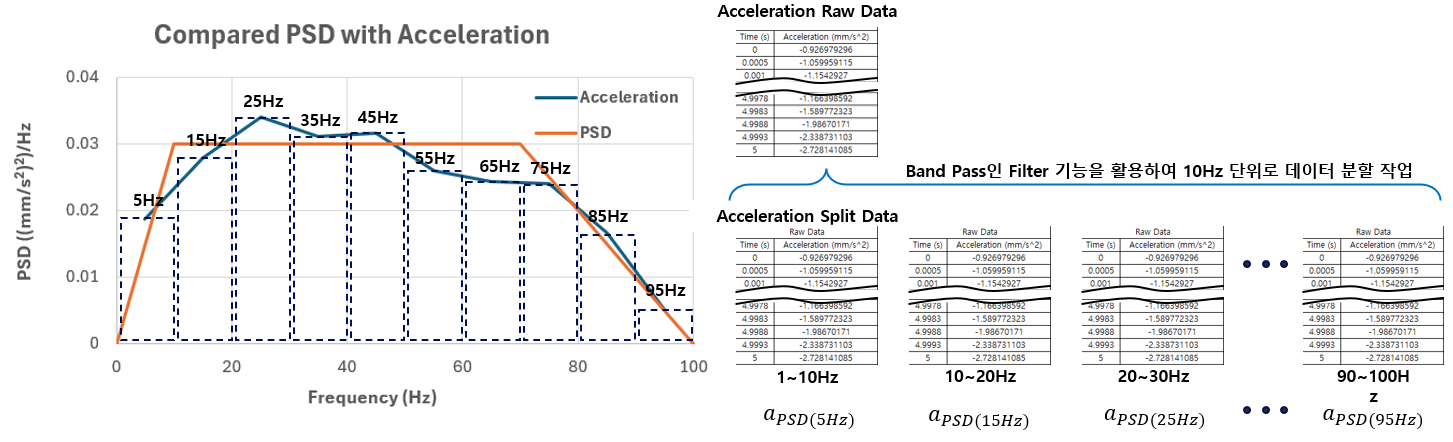
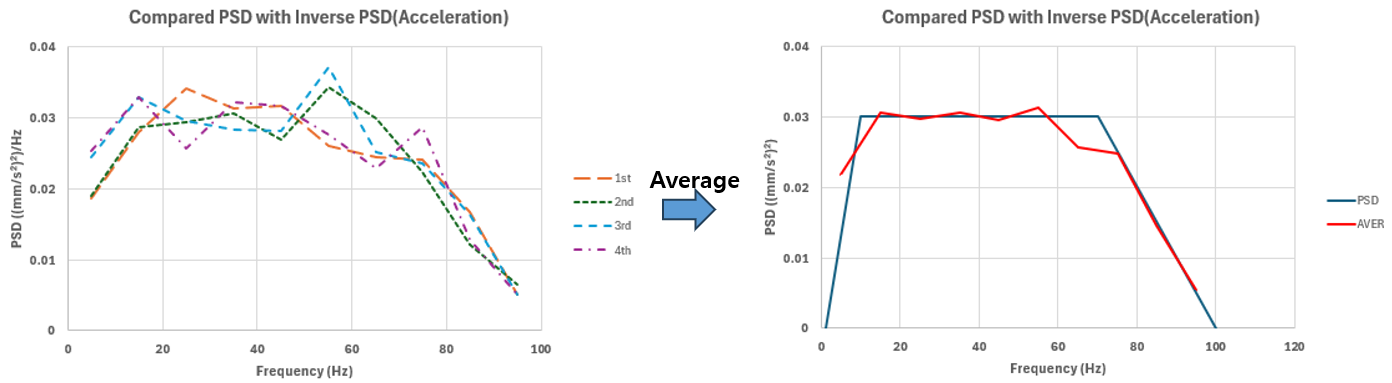
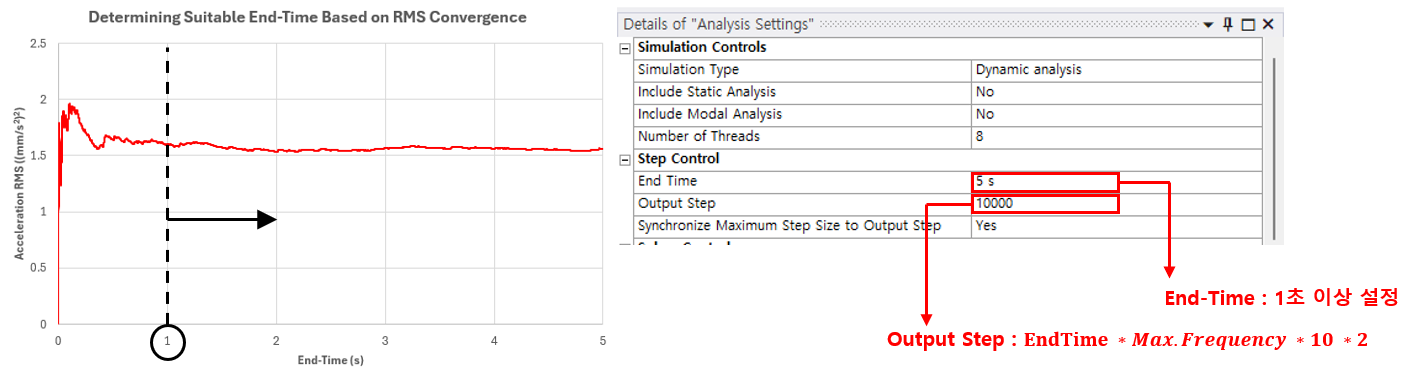
가속도 제곱을 시간 단위로 적분한 뒤 전체 시간을 나눈 값은 시간이 증가할수록 PSD의 면적에 점차 가까워지며 수렴하게 된다. 초기 구간은 데이터가 부족해 변동이 크지만 일정 시간 이후로 RMS 값이 안정되는 구간이 나타난다. 따라서 End-Time은 RMS가 수렴을 시작하는 구간으로 설정하는 것이 해석 시간과 정확성에 가장 적절한 값이다. 그리고 Output Step은 시간 영역 신호가 최대 주파수 성분을 충분히 재현할 수 있도록 설정해야 한다. 일반적으로 최대 주파수 기준으로 1사이클당 최소 10개 이상의 샘플이 필요하다.
[그림 16] Reliability Testing Process
맺음말



 ㈜태성에스엔이
㈜태성에스엔이-
- 대표이사 : 심진욱, 박인규
- 사업자등록번호 : 219-81-23192
- 통신판매업 신고번호 : 제2017-서울성동-1100호
ⓒ TAE SUNG S&E Inc.



