
ANZINE : CAE 기술 매거진
이전 ANZINE Home Tech-Insight



Thyristor Bridge 정류 회로를 적용한 전자석잭 구동 해석
- 김창환 수석매니저
- 태성에스엔이
- chkim@tsne.co.kr
Thyristor Bridge 정류 회로를 적용한 전자석잭 구동 해석
Introduction
원자로 내 노심 제어를 목적으로 제어봉을 핵연료에 삽입하거나 인출해야 한다. 이때 사용되는 장치를 원자로 제어봉 구동 장치(Control Element Drive Mechanism, CEDM)이라 호칭한다. 본 원고에서는 자석잭 방식의 제어봉 구동 장치를 Ansys Maxwell®과 Simplorer®로 해석한 내용을 소개한다.
서론
원자력 발전소의 안전한 운전을 위해 가장 중요한 장치 중 하나는 제어봉(Control Rod) 이다. 제어봉은 원자로 내부에서 핵분열 반응에 참여하는 중성자의 수를 조절하여 원자로 출력과 반응도를 제어하는 역할을 수행한다. 특히 비상 상황에서는 제어봉이 빠르게 삽입되어 핵반응을 즉시 정지시키는 SCRAM 기능을 수행해야 하므로, 제어봉 구동장치(Control Rod Drive Mechanism, CRDM)는 매우 높은 신뢰성과 빠른 응답 특성을 요구한다. 제어봉 구동장치는 일반적으로 전자기 구동 방식(Electromagnetic Actuation)을 사용하며, 솔레노이드 구조를 기반으로 제어봉을 단계적으로 이동시키거나 유지하는 역할을 수행한다. 이러한 시스템은 다음과 같은 물리 현상이 복합적으로 작용한다.
- 전자기장 현상
- 전력전자 회로
- 기계 운동
따라서 실제 시스템 거동을 정확히 분석하기 위해서는 전자기 해석과 시스템 회로 해석을 연성하여 분석하는 접근 방식이 필요하다. 본론에서는 Ansys Maxwell를 이용한 전자기장 해석과 Simplorer를 이용한 시스템 회로 해석을 결합하여 원자로 제어봉 구동장치의 전자기적 거동 특성을 분석하였다.
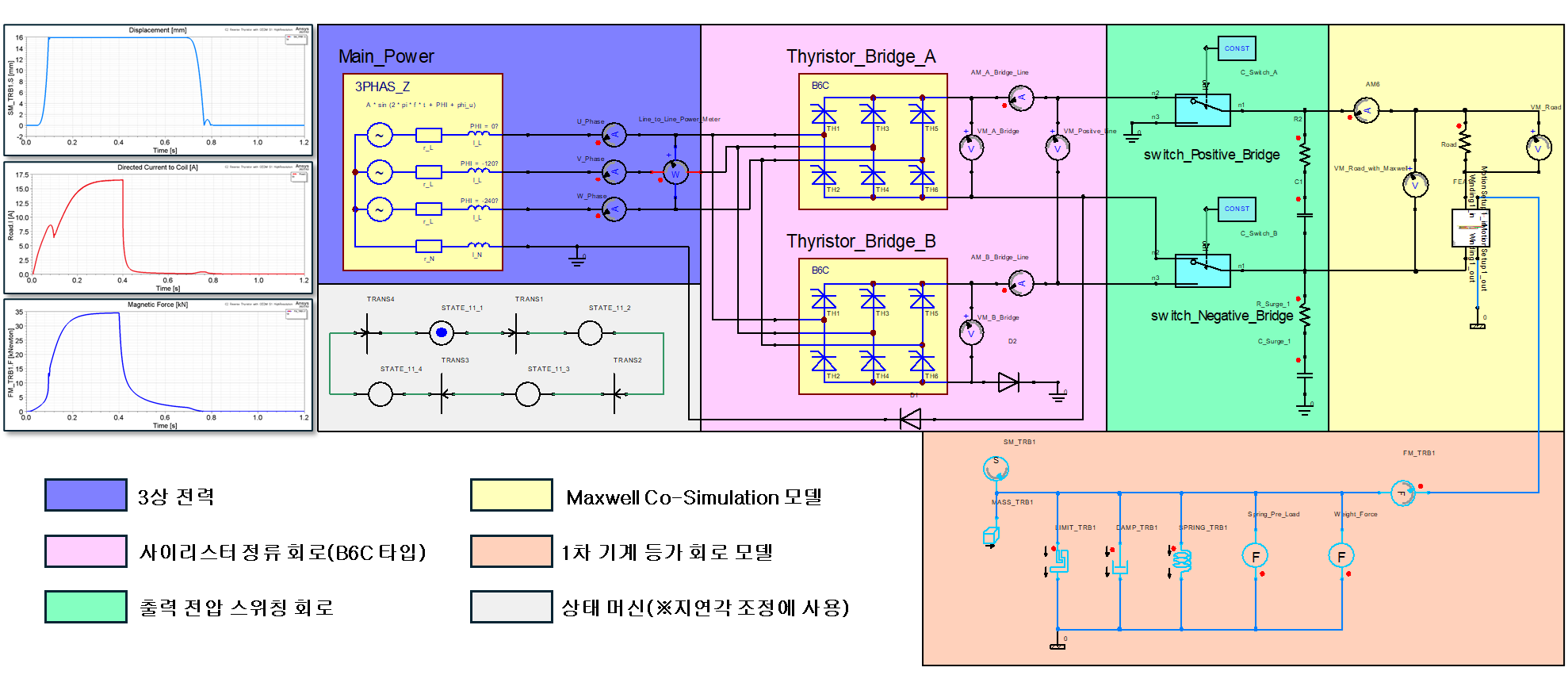
[그림 1] 전체 해석 모델 회로도(최종 모델)
[그림 1]은 제어봉 구동장치 전력-전자기 시스템 모델 전체 흐름을 보여주는 블록도 이다. 이 모델은 3상 전원 → Thyristor 정류 → 스위칭 브리지 → 솔레노이드 코일 → 전자기력 → 기계 운동의 흐름으로 구성된다. 이 시스템은 원자로 제어봉 구동 솔레노이드의 전자기 거동을 분석하기 위한 시스템 모델이다. 해석 목적은 솔레노이드에 인가되는 코일 전류를 모델링하고, 이로 인해 계산된 전자기력이 플런저를 이동 시키는데, 이 과정에서 전력전자 스위칭 영향도 확인할 수 있도록 구성되어 있다. 이를 위해 전력전자 회로, 전자기 해석, 기계 운동 해석 이 결합되어 있는 멀티 피직스 시스템 모델이다.
본론
Co-Simulation 준비 작업과 해석 결과
제어봉 구동 솔레노이드의 동작을 분석하기 위해 구성한 Maxwell–Simplorer Co-Simulation 모델을 설명하고자 한다. 전자기 해석과 전력전자 회로, 그리고 기계 동역학 모델을 통합하여 실제 제어봉 구동 시스템의 동작을 모사할 수 있도록 구성하였다. 먼저 솔레노이드에 관해 간단한 설명과 Maxwell 상에서 과도 해석 모델을 구축하는 중요 항목들만 살펴보고자 한다.
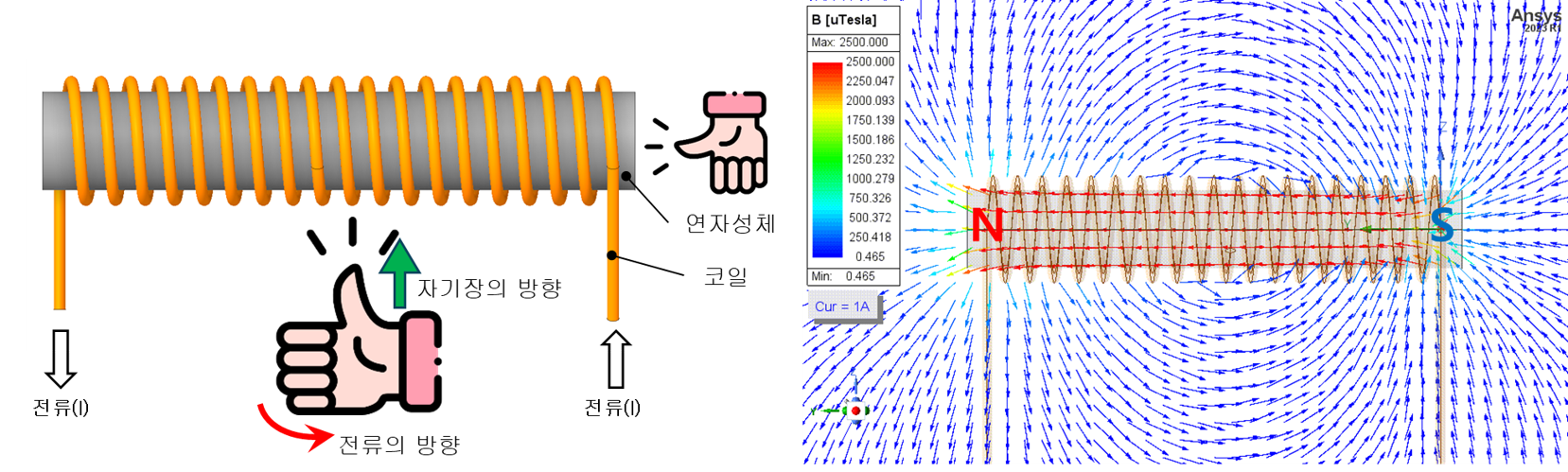
[그림 2] 솔레노이드에 인가된 전류로 인한 자속 발생
[그림 2]는 감겨 있는 코일에 전류가 흘려 자기장을 형성하고, 이를 이용하여 기계적 힘을 발생시키는 이러한 자기장 생성 원리인 ‘앙페르 법칙(Ampère’s Circuital Law)’를 설명한다. 앙페르 법칙은 전류가 흐르는 도선 주변에 자기장이 형성된다는 사실을 수학적으로 표현한 것으로 다음과 같이 나타낼 수 있다.
 여기서
여기서• H : 자기장 세기 (Magnetic field intensity)
• dl : 폐곡선 경로 요소
• Ienc: 경로 내부를 통과하는 전류
을 나타내며, 폐곡선을 따라 자기장의 선적분 값은 그 경로 내부를 통과하는 전류의 합과 같다는 것을 의미하는 수식이다.
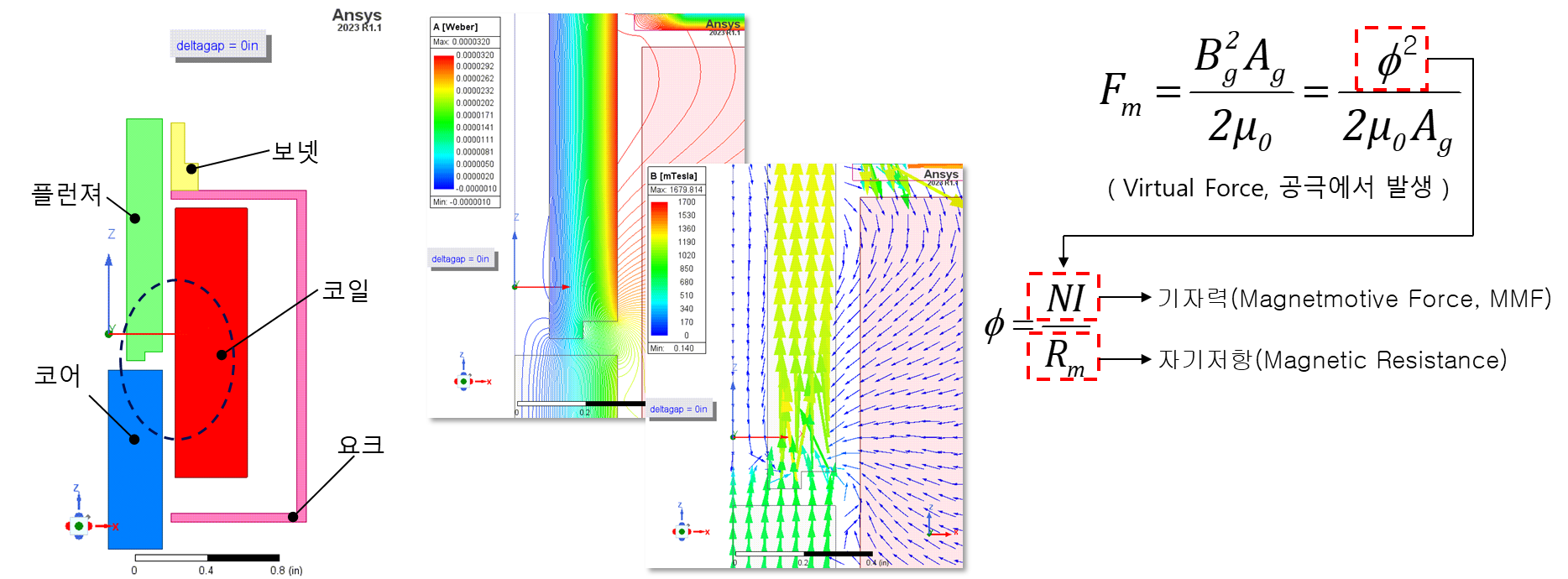
[그림 3] 솔레노이드에 인가된 전류로 인한 자속 발생
[그림 3]의 좌측은 제어봉 구동을 위한 솔레노이드의 기본 구조를 나타낸다. 솔레노이드는 전기에너지를 자기 에너지로 변환하여 기계적 운동을 발생시키는 장치로 다음과 같은 구성 요소로 이루어진다. 플런저(Plunger)는 자기력에 의해 이동하는 가동부로, 제어봉의 움직임을 직접적으로 전달하는 역할을 한다. 코일(Coil)에 전류가 인가되면 자기장을 생성하는 권선 구조이며, 발생된 자속이 강자성체인 코어(Core)는 자속이 흐를 수 있도록 하며, 요크(Yoke)는 자속의 폐회로를 형성하여 자기 회로의 효율을 높이는 역할을 한다. 보넷(Bonnet)는 구조적인 지지 역할을 수행하며 플런저의 운동을 안내하는 역할을 한다. 코일에 전류가 인가되면 자기장이 형성되고, 이 자기장은 코어와 요크를 따라 흐르며 공극(Air Gap)을 형성하게 된다. 이 공극에서 발생하는 자기력에 의해 플런저가 이동하게 된다.
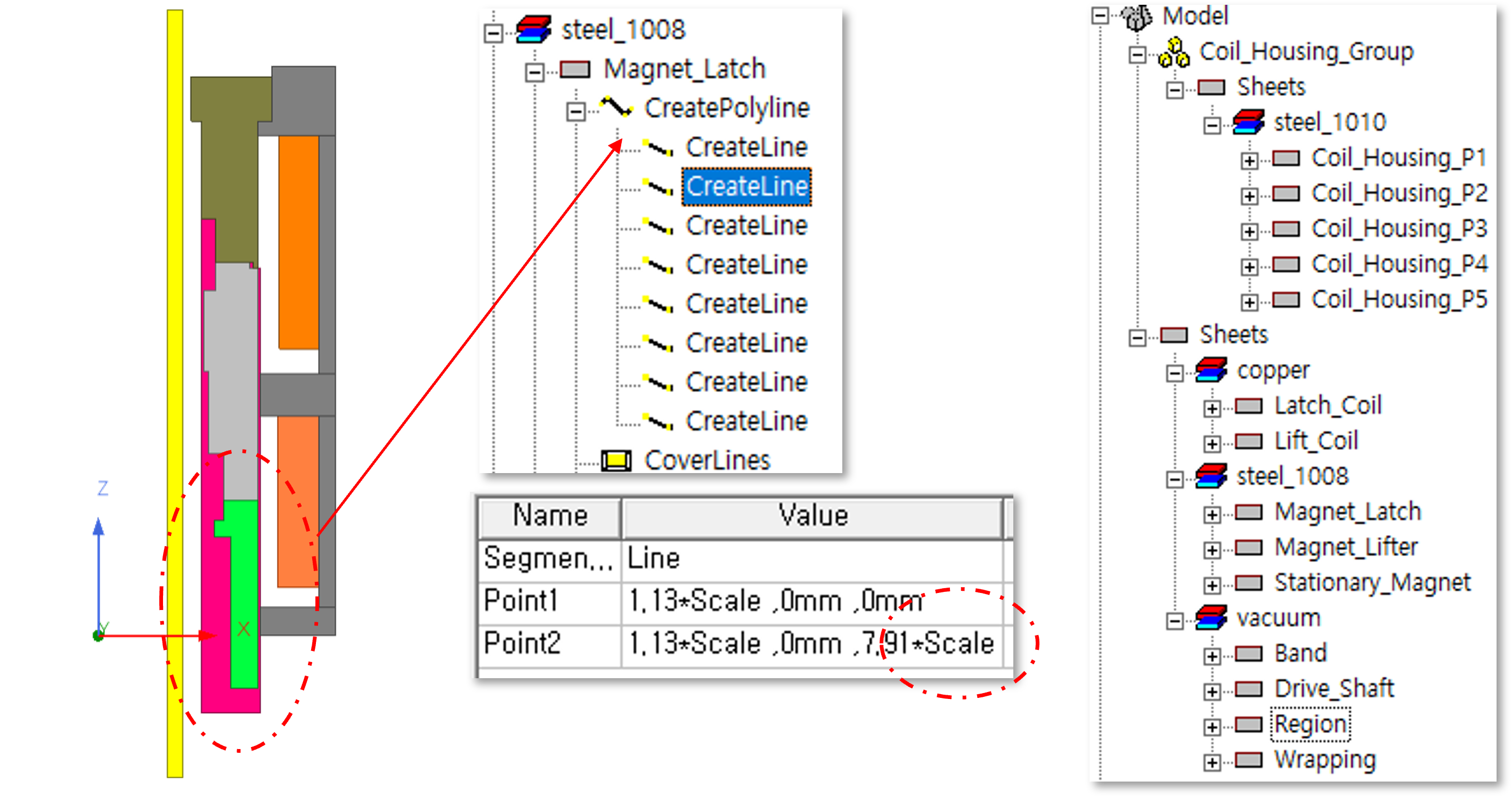
[그림 4] 자석잭 형상 및 재질 정보
[그림 4]는 제어봉 구동 솔레노이드의 단면 구조를 나타내고 있다. 그림 중앙에는 Maxwell 내 ‘모델링 트리(Model Tree)’와 상에서 여러 개의 선(Line) 세그먼트를 이용하여 폴리 라인(Polyline)을 생성하고 이를 기반으로 단면 형상을 정의하는 방식이 표현되어 있다. 특히 형상의 주요 치수는 ‘Scale’ 사용자 정의 변수를 이용하여 정의되어 있으며, 이를 통해 모델의 주요 치수를 변수 형태로 관리할 수 있도록 구성하였다. 예를 들어 그림에 표시된 Point1과 Point2 좌표는 Scale 값을 기준으로 정의되어 있으며, 이를 통해 형상 크기를 쉽게 조정할 수 있도록 하였다. 이러한 파라미터 기반 모델링 방식은 설계 변수 변경에 따른 구조 변화 분석이나 최적화 해석을 수행할 때 매우 유용하다. 그림의 우측에는 각 파트 정보가 나열되어 있다.
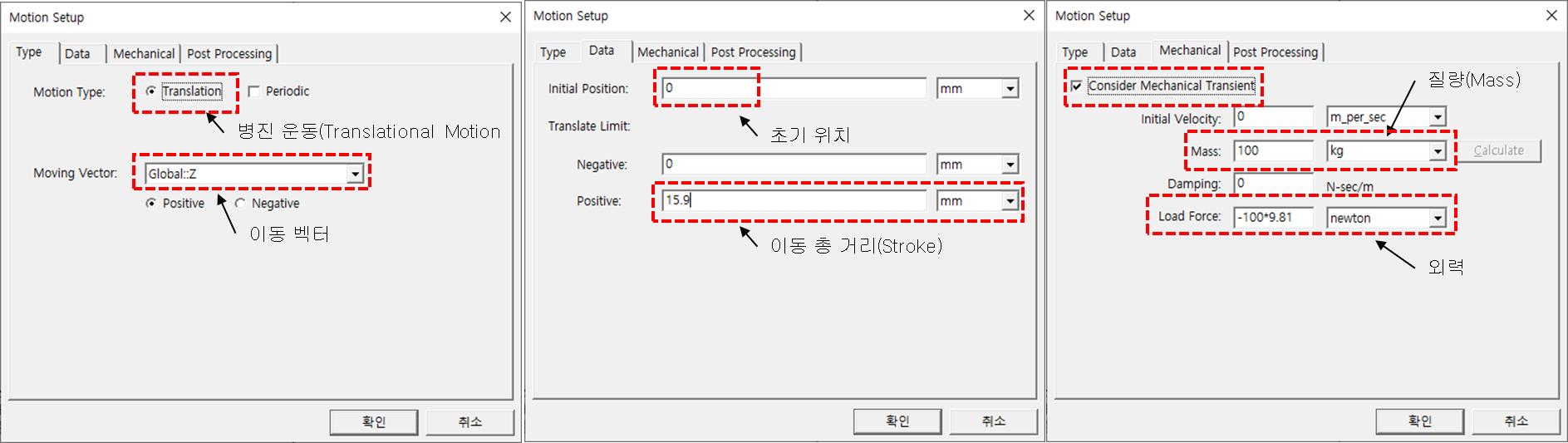
[그림 5] Motion Setup 구성
[그림 5]는 플런저 움직임을 고려하기 위해 설정한 ‘Motion Setup 구성 과정’을 나타낸다. 제어봉 구동장치는 솔레노이드 코일에 전류가 인가되면 발생하는 전자기력에 의해 플런저가 이동하는 구조이므로, 전자기 해석과 함께 기계적 운동을 동시에 고려하는 해석 모델이 필요하다. 이를 위해 Maxwell에서는 병진 운동(Translational Motion) 기반의 기계 운동 모델을 설정하여 플런저의 이동을 해석에 반영하였다. 병진 운동 설정으로 ‘Motion Setup’ 상에서 ‘Translation’ Type를 설정하였다. Moving Vector는 Global Z 방향으로 지정하였다. 이는 실제 제어봉 구동장치에서 플런저가 축 방향으로 이동하는 구조를 반영한 것이다. 그 다음 탭에서는 초기 위치 및 이동 범위 설정으로 단계로써 초기 위치(Initial Position)는 0 mm로 설정하였으며, 이동 가능한 최대 위치는 15.9 mm로 지정하였다. 이 값은 실제 제어봉 구동장치에서 플런저가 이동할 수 있는 최대 Stroke 거리를 의미한다. 세 번째 그림은 플런저의 기계적 특성을 반영하기 위한 Mechanical 설정을 나타낸다. 해석에서는 실제 시스템의 동적 거동을 반영하기 위해 Consider Mechanical Transient 옵션을 활성화하였다. 이를 통해 시간에 따른 플런저의 위치 변화와 속도 변화를 동적으로 계산할 수 있다. 플런저의 질량(Mass)은 100 kg으로 설정하였으며, 이는 실제 제어봉 구동장치에서 이동하는 구조물의 질량을 반영한 값이다. 또한 외력(Load Force)은 −100 × 9.81 N으로 설정하였다. 이는 플런저에 작용하는 중력 하중을 고려한 것으로, 전자기력과 중력의 상호작용을 동시에 고려할 수 있도록 설정하였다.
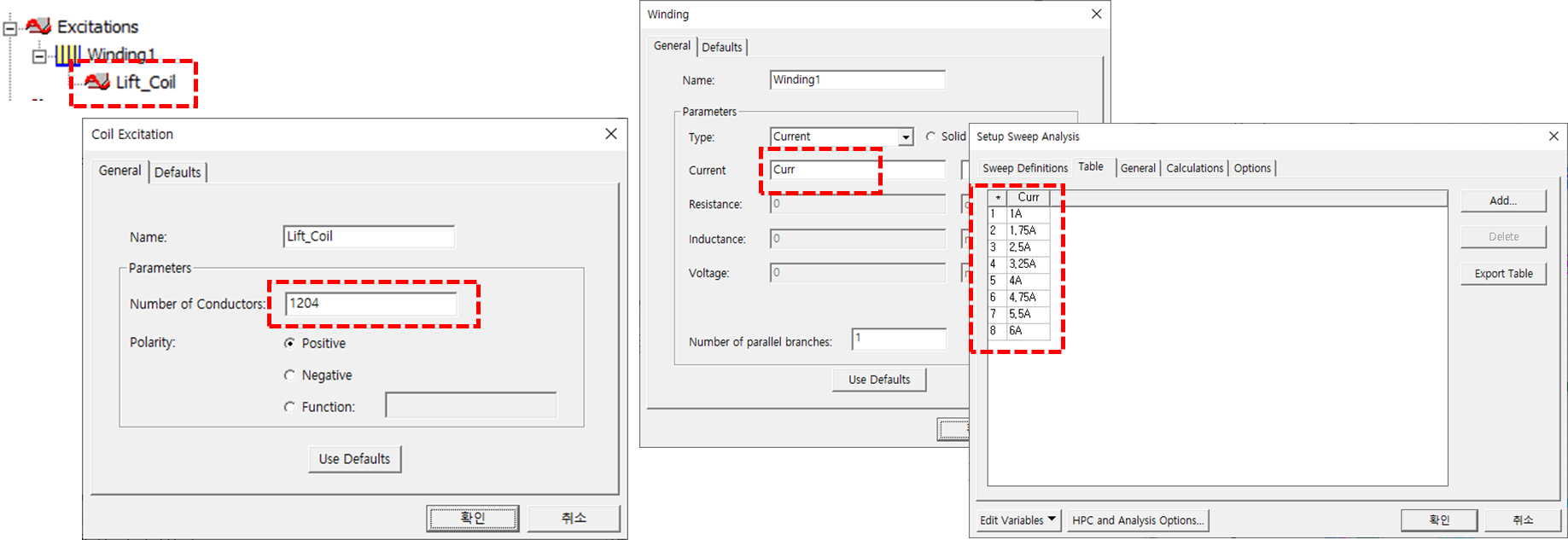
[그림 6] 코일 권선 전류 입력 조건
[그림 6]은 코일에 인가되는 전류 조건을 설정하고, 전류 변화에 따른 전자기 특성을 분석하기 위한 설정 과정을 나타낸다. 그림의 좌측은 Maxwell 모델 트리에서 솔레노이드 코일에 대한 Excitation 설정 과정을 나타낸다. 본 모델에서는 Lift_Coil에 대해 Coil Excitation을 정의하였으며, 코일의 권선 수(Number of Conductors)는 1204 turns로 설정하였다.
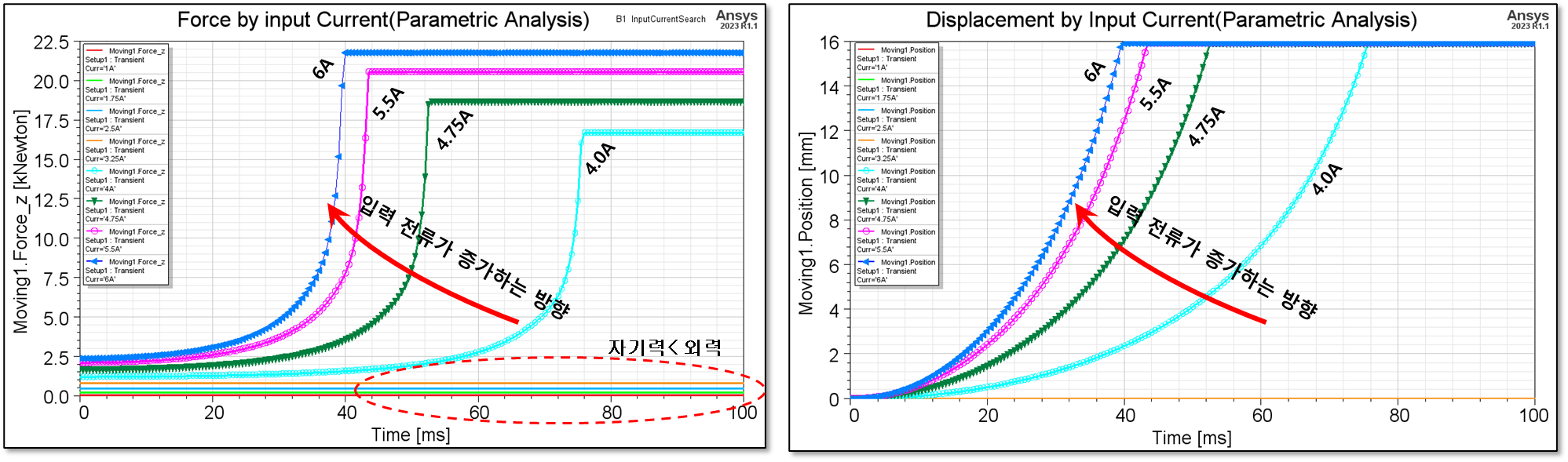
[그림 7] 코일 권선 전류 입력 조건
[그림 7]은 입력 전류에 관한 파라메트릭 해석 결과로, 솔레노이드 코일에 인가되는 전류 변화에 따른 전자기력(Electromagnetic Force)과 플런저 변위(Displacement) 특성을 나타낸다. 이는 앙페르 법칙에 의해 코일 전류가 증가하면 자기장이 증가하고, 그에 따라 공극에서 발생하는 자기력이 증가하기 때문이다. 특히 약 40 ms 이후 구간에서 전자기력이 급격히 증가하는 현상이 나타나는데, 이는 플런저가 코어 방향으로 이동하면서 공극이 감소하기 때문이다. 공극이 줄어들면 자기 회로의 자기 저항(Reluctance)이 감소하고 자속 밀도가 증가하여 전자기력이 급격히 증가하기 때문이다. 또한 그래프에서 확인할 수 있듯이 전류가 높은 경우(5.5 A, 6 A)에는 전자기력이 더 빠르게 증가하여 솔레노이드 구동력이 크게 향상되는 것을 확인할 수 있다. 다음으로는 전류에 따른 플런저 변위 특성으로, 우측 그래프는 동일한 전류 조건에서 플런저의 시간에 따른 변위(Moving Position)를 나타내고 있다. 그래프를 보면 입력 전류가 증가할수록 플런저의 이동 속도가 증가하는 것을 확인할 수 있다. 전류가 높은 경우에는 더 큰 전자기력이 발생하기 때문에 플런저가 더 빠르게 이동하여 목표 위치에 도달하게 된다. 예를 들어 전류가 6 A인 경우에는 약 30 ms 부근에서 최대 스트로크에 도달하는 반면, 전류가 4 A인 경우에는 상대적으로 긴 시간이 필요하다. 이러한 결과는 솔레노이드 구동장치의 응답 특성이 입력 전류에 크게 의존함을 보여준다. 이러한 해석 결과를 통해서, ‘코일 전류 증가에 따른 전자기력 증가 특성’, ‘공극 감소에 따른 자기력 급증 현상’, ‘입력 전류에 따른 플런저 응답 속도 변화’, ‘솔레노이드 구동력과 기계 운동 간의 상호작용’를 확인할 수 있으며, 특히 제어봉 구동장치와 같은 안전 관련 시스템에서는 충분한 구동력을 확보하면서도 빠른 응답 특성을 확보하는 것이 중요하기 때문에 이러한 전자기 해석 결과는 설계 검증 및 성능 평가에 중요한 자료로 활용될 수 있다.
Co-Simulation 준비 작업과 해석 결과
제어봉 구동 솔레노이드의 동작을 분석하기 위해 구성한 Maxwell–Simplorer Co-Simulation 모델을 설명하고자 한다. 전자기 해석과 전력전자 회로, 그리고 기계 동역학 모델을 통합하여 실제 제어봉 구동 시스템의 동작을 모사할 수 있도록 구성하였다.
제어봉 구동 솔레노이드의 동작을 분석하기 위해 구성한 Maxwell–Simplorer Co-Simulation 모델을 설명하고자 한다. 전자기 해석과 전력전자 회로, 그리고 기계 동역학 모델을 통합하여 실제 제어봉 구동 시스템의 동작을 모사할 수 있도록 구성하였다.
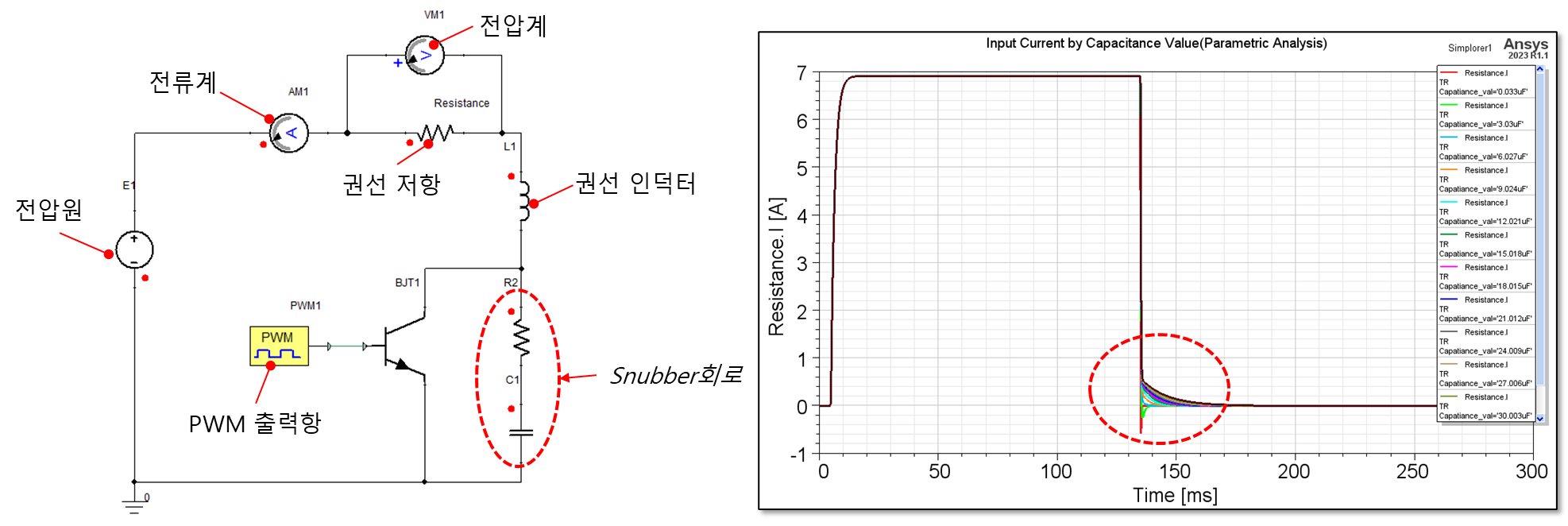
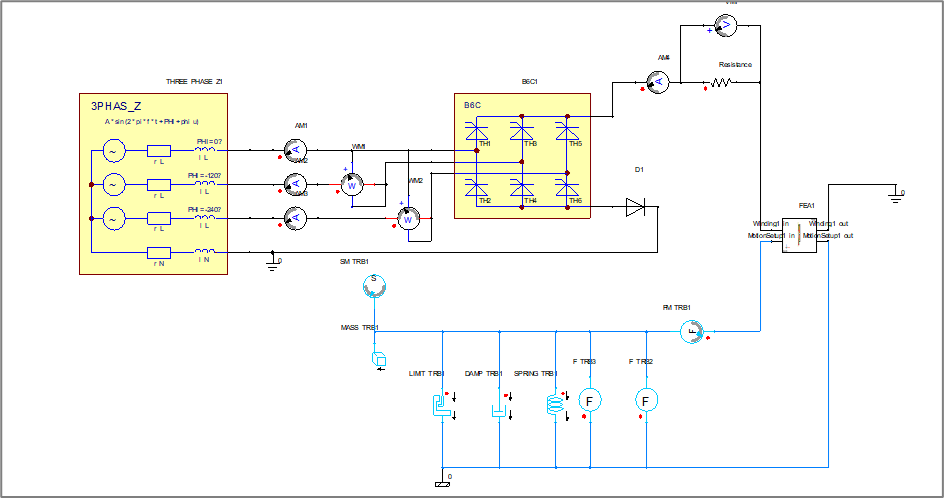
[그림 8] PWM 구동 회로 구성 및 커패시터 값에 따른 전류 특성 분석
[그림 8]은 Simplorer를 이용한 ‘PWM 구동 전기 회로’이며, 커패시터 용량 변화에 따른 전류 특성을 분석한 결과를 나타낸다. 회로는 전원 공급 장치(E1), PWM 제어 신호, 스위칭 소자(BJT), 그리고 솔레노이드 코일 등가 모델(저항, 인덕터)로 구성되어 있다. PWM 블록(PWM1)은 스위칭 소자를 제어하여 코일에 인가되는 전류를 조절하는 역할을 한다. PWM 신호에 의해 트랜지스터(BJT1)가 스위칭 동작을 수행하며, 이를 통해 솔레노이드 코일(L1)에 흐르는 전류를 제어할 수 있다. 또한 회로에는 전류계(AM1)와 전압계(VM1)가 포함되어 있어 코일에 흐르는 전류와 전압을 모니터링할 수 있도록 구성하였다. 코일에는 권선 저항(Resistance)이 포함되어 실제 코일의 전기적 특성을 반영하였다. 회로의 우측에는 저항(R2)과 커패시터(C1) 로 구성된 스너버 회로가 포함되어 있다. 스너버 회로는 스위칭 동작 시 발생하는 전압 스파이크와 전류 진동을 억제하기 위해 사용된다. 솔레노이드와 같은 인덕턴스가 큰 부하에서는 스위칭이 종료될 때 코일에 저장된 에너지가 방출되면서 전압 및 전류의 과도 현상이 발생할 수 있다. 이러한 과도 현상은 스위칭 소자의 손상이나 시스템 불안정을 유발할 수 있으므로, 스너버 회로를 통해 이를 완화할 필요가 있다. 해석 결과를 보면 스위칭이 종료되는 약 130 ms 부근에서 전류의 과도 응답이 발생하는 것을 확인할 수 있다. 특히 커패시터 용량이 작은 경우에는 전류의 진동이 크게 나타나며, 커패시터 용량이 증가할수록 이러한 진동이 점차 감소하는 경향을 보인다. 이는 커패시터가 인덕턴스 부하에서 발생하는 에너지를 흡수하여 전류 변화를 완화하는 역할을 하기 때문이다. 본 결과를 통해 PWM 기반 솔레노이드 구동 회로에서 커패시터 용량이 전류 응답 특성에 미치는 영향을 확인할 수 있었다. 특히 스너버 회로의 커패시터 값은 전류의 과도 진동을 감소시키고 스위칭 안정성을 향상시키는 데 중요한 역할을 한다는 것을 이해할 수 있다.
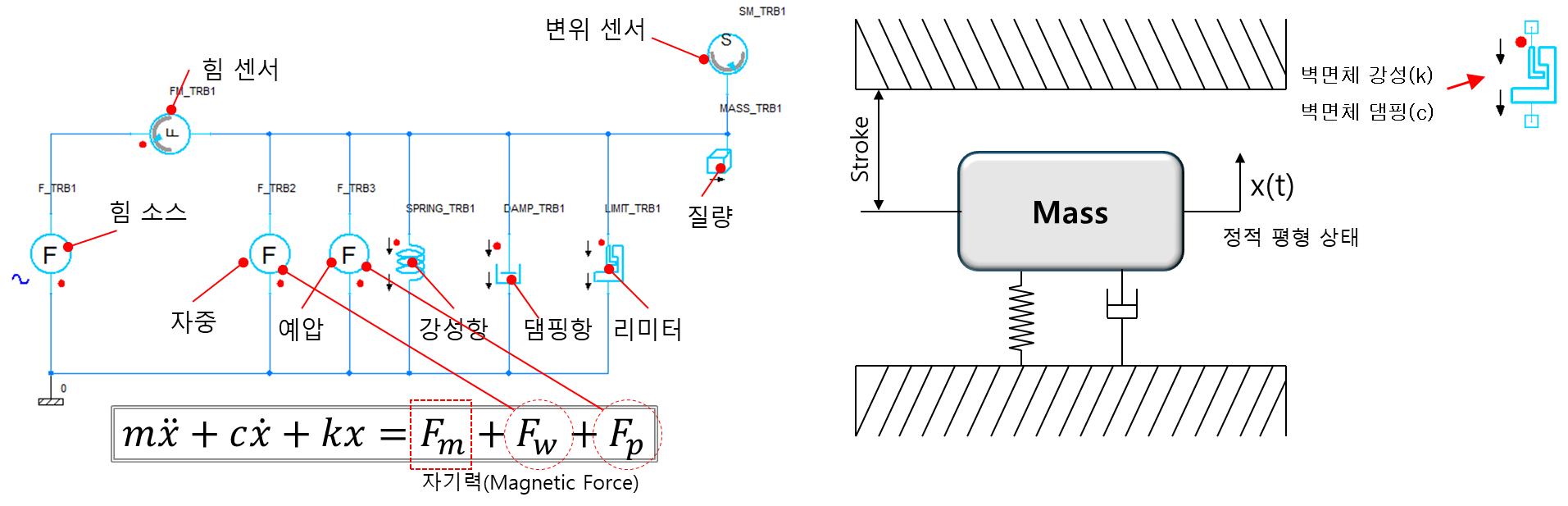
[그림 9] 기계 등가 회로
[그림 9]는 플런저의 기계적 운동을 모델링한 기계 동역학 시스템 모델을 나타낸다. 제어봉 구동 솔레노이드에서는 코일에 전류가 인가되면 전자기력이 발생하고, 이 힘에 의해 플런저가 이동하게 된다. 따라서 전자기 해석 결과를 실제 구동 시스템의 운동으로 연결하기 위해서는 플런저의 질량, 스프링 특성, 감쇠 효과 등과 같은 기계적 요소를 함께 고려해야 한다. 힘 소스(Force Source)는 Maxwell 해석을 통해 계산된 전자기력을 입력으로 사용하여 플런저에 작용하는 구동력을 나타낸다. 자중(Gravity)은 플런저 및 연결 구조물의 중량에 의해 발생하는 중력 하중으로 고려 되었으며, 예압(Preload) 시스템 내부에 존재하는 초기 하중 조건, 강성(Spring)은 플런저의 초기 위치로 배치되기 위한 역할로 추가 되었다. 또한 댐핑(Damper) 구조물의 마찰 및 에너지 손실 효과와 운동 중 발생하는 진동을 감쇠 시키는 역할을 한다. 리미터(Limiter) 플런저의 이동 범위를 제한하여 실제 기계 구조의 물리적 한계를 모사하였다.
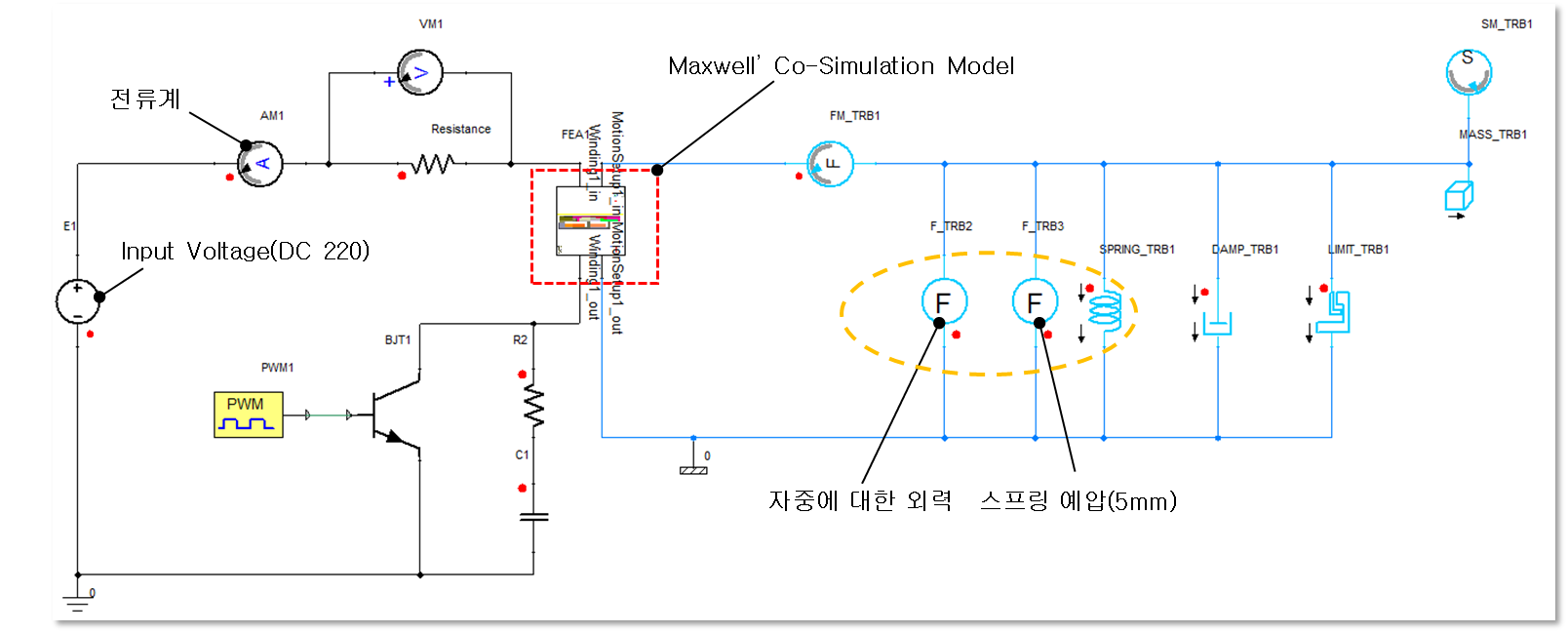
[그림 10] Co-Simulation 회로 모델
[그림 10]은 Co-Simulation 모델로, PWM 기반 전력 회로에서 계산된 전류가 Maxwell 전자기 해석 모델로 전달되어 자속 분포 및 전자기력이 계산되어 기계 모델에 전달되도록 구성되었다. 이를 통해서 플런저의 위치 및 속도 계산, 위치 정보가 다시금 Maxwell 해석 모델로 전달되는 시스템 해석 모델이다.
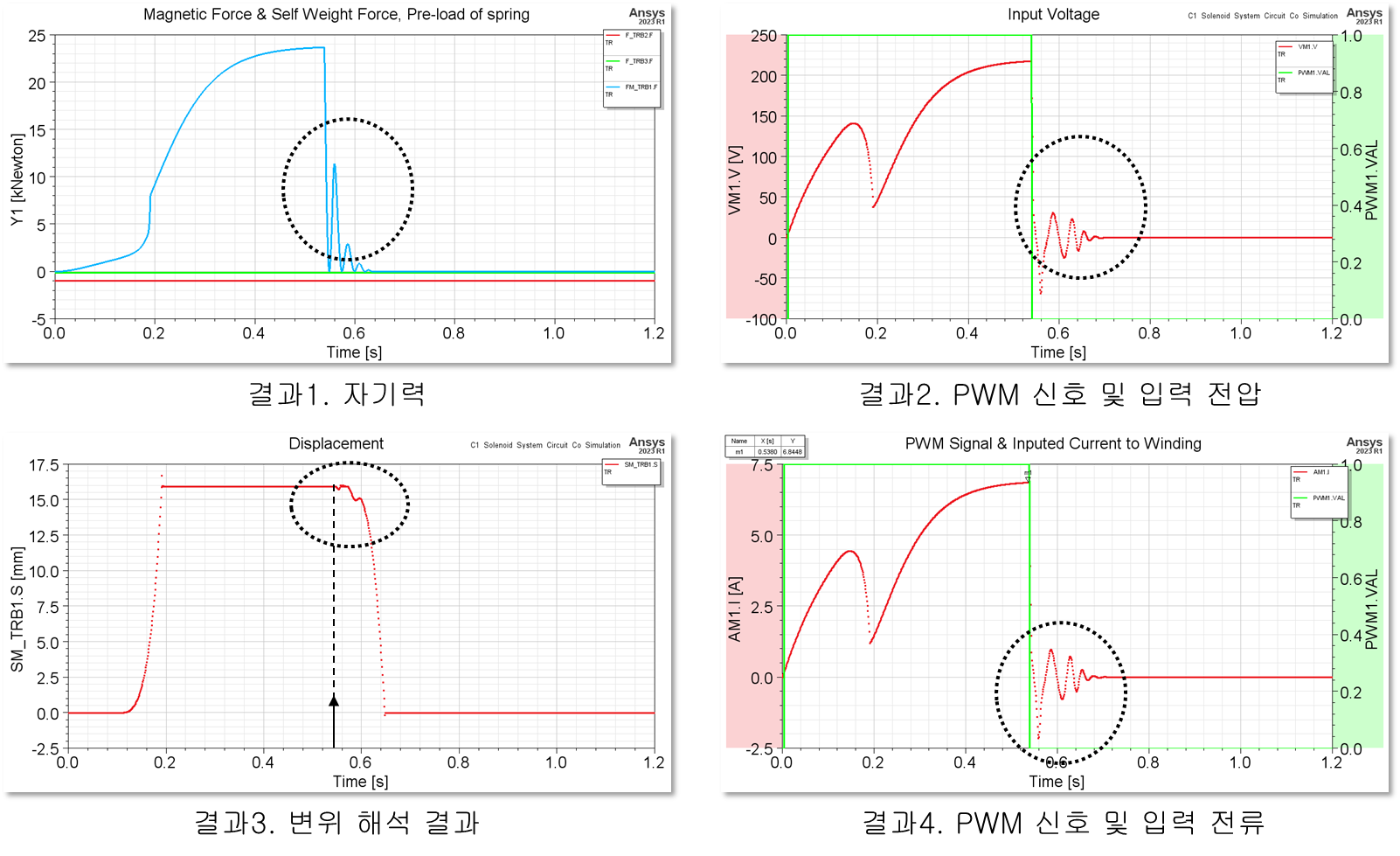
[그림 11] Co-Simulation 기반 제어봉 구동 해석 결과
[그림 11]는 Maxwell–Simplorer Co-Simulation을 통해 분석한 제어봉 구동 솔레노이드 시스템의 시간 응답 특성을 나타낸다. 전력 구동 회로, 전자기 해석 모델, 그리고 기계 동역학 모델을 연성하여 실제 제어봉 구동 시스템의 동작을 모사하였다. 결과는 전자기력, 입력 전압, 코일 전류, 그리고 플런저 변위의 시간에 따른 변화를 함께 보여준다. 좌측 상단 그래프는 솔레노이드에서 발생하는 전자기력(Magnetic Force)과 플런저에 작용하는 외력 조건을 나타낸다. 그래프에서 파란색 곡선은 코일 전류에 의해 발생하는 전자기력을 나타내며, 시간이 지남에 따라 전자기력이 증가하여 약 0.4~0.5초 부근에서 최대 구동력을 형성하는 것을 확인할 수 있다. 또한 플런저에는 스프링 예압과 자중에 의한 하중이 동시에 작용한다. 이러한 외력은 전자기력과 상호 작용하며 플런저의 실제 운동 특성을 결정하게 된다. 약 0.5초 이후에는 차단된 전압 신호로 전자기력이 감소하고, 이에 따라 플런저에 작용하는 힘 역시 급격히 감소하는 과도 응답이 발생하는 것을 확인할 수 있다. 우측 상단 그래프는 코일에 인가되는 입력 전압(Input Voltage)의 시간 응답을 나타낸다. PWM 제어에 의해 코일 전압이 증가하면서 솔레노이드 구동 전류가 형성된다. 약 0.5초 이후 PWM 신호가 차단되면서 전압이 급격히 감소하고, 이 과정에서 인덕턴스 부하 특성으로 인해 일시적인 전압 진동이 발생하는 것을 확인할 수 있다. 이러한 과도 현상은 스위칭 회로와 인덕턴스의 상호작용에 의해 발생하는 것으로, 실제 솔레노이드 구동 회로에서도 나타날 수 있는 전형적인 특성이다. 좌측 하단 그래프는 플런저의 변위(Displacement) 변화를 나타낸다. 초기 구동 시 전자기력에 의해 플런저가 빠르게 이동하여 약 0.2초 이후 최대 스트로크 위치에 도달하는 것을 확인할 수 있다. 이후 일정 시간 동안 플런저는 해당 위치를 유지하며, 약 0.55초 부근에서 전류가 차단되면서 전자기력이 감소함에 따라 스프링 복원력에 의해 플런저가 원래 위치로 복귀하게 된다. 이 과정에서 나타나는 작은 진동은 기계 시스템의 감쇠 특성과 스프링 복원력에 의해 발생하는 동적 응답으로 해석할 수 있다. 우측 하단 그래프는 PWM 신호와 함께 솔레노이드 코일에 흐르는 입력 전류(Input Current)를 나타낸다. PWM 제어가 시작되면 코일 전류가 점차 증가하여 약 7 A 수준의 정상 상태에 도달한다. 이후 PWM 신호가 차단되면 코일에 저장된 자기 에너지가 방출되면서 전류가 급격히 감소하며, 이 과정에서 감쇠 진동 형태의 과도 응답이 나타난다. 이러한 특성은 인덕티브 부하를 구동하는 전력전자 회로에서 일반적으로 나타나는 전류 응답 특성이다.
Thyristor 기반 전력 구동 시스템
Thyristor는 고전력 전력전자 시스템에서 널리 사용되는 대표적인 반도체 스위칭 소자이다. 대표적인 형태인 SCR(Silicon Controlled Rectifier)은 PNPN 구조로 이루어진 4층 반도체 소자로, Gate 단자를 통해 전도 상태를 제어할 수 있다. Thyristor는 한 번 도통 상태가 되면 전류가 일정 수준 이하로 감소할 때까지 계속 도통 상태를 유지하는 Latch 특성을 가지며, 이러한 특성으로 인해 대전류 및 고전압 전력 제어에 매우 적합하다.
Thyristor는 고전력 전력전자 시스템에서 널리 사용되는 대표적인 반도체 스위칭 소자이다. 대표적인 형태인 SCR(Silicon Controlled Rectifier)은 PNPN 구조로 이루어진 4층 반도체 소자로, Gate 단자를 통해 전도 상태를 제어할 수 있다. Thyristor는 한 번 도통 상태가 되면 전류가 일정 수준 이하로 감소할 때까지 계속 도통 상태를 유지하는 Latch 특성을 가지며, 이러한 특성으로 인해 대전류 및 고전압 전력 제어에 매우 적합하다.
[그림 12] 싸이리스터 브릿지 회로가 적용된 시스템 해석 모델
[그림 12]는 이러한 Thyristor 특징을 Simplorer 상에서 sub-system으로 구성된 기능 블록을 사용한 Co-Simulation 모델이다. 특히 전력 변환 시스템에서는 Thyristor를 이용하여 교류 전원을 직류 전원으로 변환하는 위상 제어 정류기(Controlled Rectifier)를 구성할 수 있으며, 이를 통해 출력 전압과 전류를 정밀하게 제어할 수 있다. Simplorer 는 위상 제어 정류기를 sub-system 기능 블록으로 구성되어 있어서 회로 설계 효율을 높여 줄 수 있다. 그림의 좌측에는 3상 전원(Main Power)이 배치되어 있으며, 이는 실제 전력 시스템을 모사하기 위해 3상 교류 전원을 입력으로 사용한 것이다. 각 상에는 선로 임피던스가 포함되어 있으며, 전압과 전류 측정을 위한 센서가 함께 구성되어 있다. 이 3상 교류 전원은 이후 Thyristor 정류기를 통해 직류 전력으로 변환되어 솔레노이드 구동 회로에 공급된다. 그림 중앙에는 두 개의 Thyristor Bridge가 배치되어 있다. 각 브리지는 6펄스 정류기(B6C Bridge) 구조로 구성되어 있으며, 총 6개의 Thyristor 소자를 이용하여 3상 교류 전원을 직류 전원으로 변환한다. 이러한 구조는 다음과 같은 특징을 가진다.
• 높은 전력 처리 능력
• 안정적인 직류 전력 공급
• 위상 제어를 통한 출력 전압 제어
정류된 전력은 이후 스위칭 회로와 솔레노이드 코일로 전달된다.
Transistor 스위칭 회로와 Thyristor Bridge 회로의 구동 특성 비교
앞서 다룬 단순 PWM 스위칭 회로 모델과 Thyristor Bridge 회로를 비교 분석하여, 전원 모델에 따른 해석 결과를 비교해 보자.
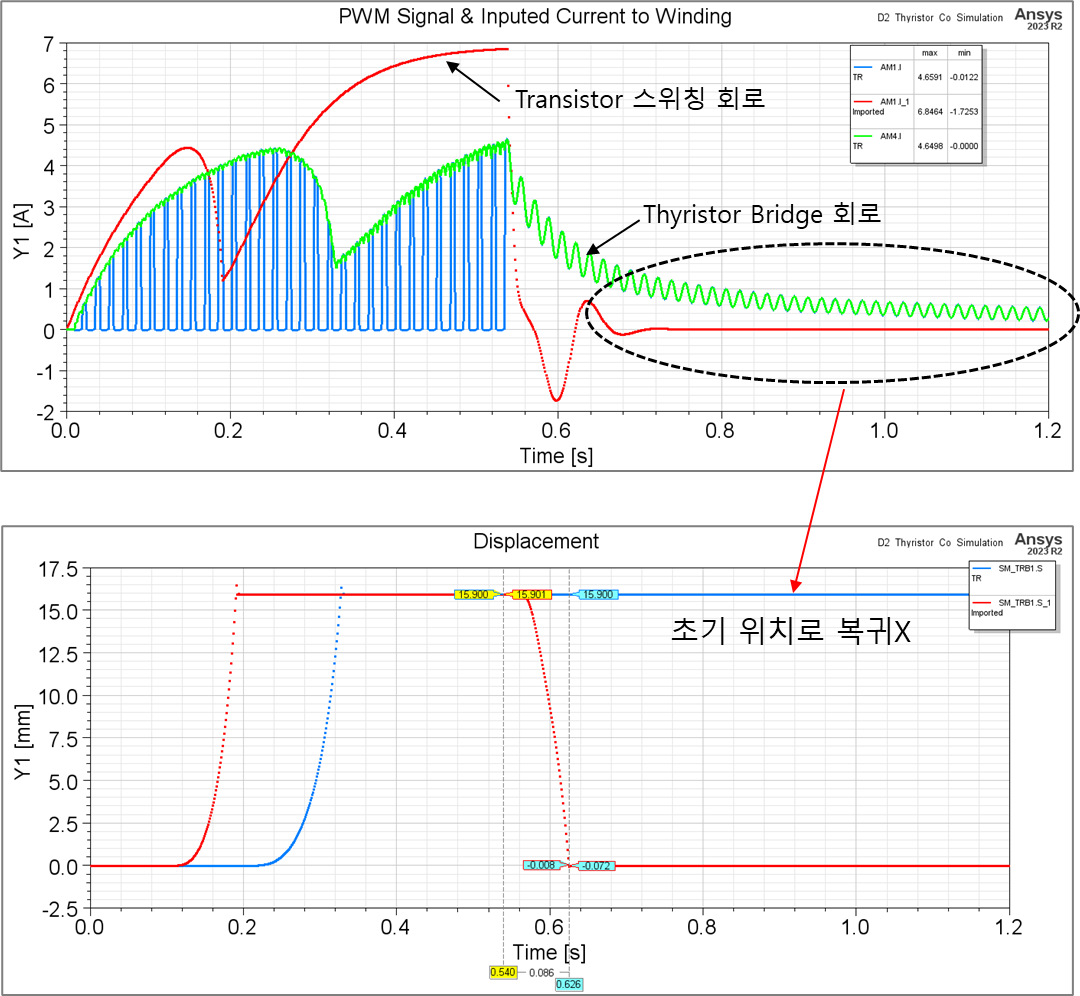
[그림 13] 구동 회로별(PWM 회로 vs 싸이리스터 회로) 플런저 변위 해석 결과 차이
[그림 13]는 솔레노이드 구동 시스템에서 Transistor 기반 PWM 스위칭 회로와 Thyristor Bridge 기반 전력 회로의 전류 응답 및 플런저 변위 특성을 비교한 결과를 나타낸다. 본 해석은 Maxwell–Simplorer Co-Simulation을 통해 수행되었으며, 전력전자 회로와 전자기 해석, 그리고 기계 동역학 모델을 통합하여 시스템 동작을 분석하였다. 코일 전류 응답 특성으로, 상단 그래프는 솔레노이드 코일에 인가되는 전류의 시간 응답을 나타낸다. 그래프에서 파란색 파형은 PWM 신호에 의해 구동되는 Transistor 스위칭 회로의 전류 특성을 나타내며, 녹색 곡선은 시스템에서 실제 코일에 형성되는 전류를 나타낸다. PWM 제어에 의해 전류가 펄스 형태로 인가되면서 평균 전류가 점차 증가하는 것을 확인할 수 있다. 반면 Thyristor Bridge 기반 구동 회로에서는 전류가 보다 안정적인 형태로 공급되며, 전류 차단 이후에는 인덕턴스 부하 특성으로 인해 감쇠 진동 형태의 과도 응답이 나타난다. 특히 전류 차단 시점 이후에는 코일에 저장된 자기 에너지가 방출되면서 전류가 점진적으로 감소하는 특성이 나타난다. 플런저 변위 특성으로, 하단 그래프는 전류 응답에 따른 플런저의 변위(Displacement) 변화를 나타낸다. 전류가 증가하면서 솔레노이드 내부에서 발생하는 전자기력이 증가하고, 이에 따라 플런저가 이동하여 약 15.9 mm의 최대 스트로크 위치에 도달하는 것을 확인할 수 있다. 이후 전류가 차단되면 전자기력이 감소하게 되며, 스프링 복원력과 중력 등의 외력에 의해 플런저가 초기 위치로 복귀하게 된다. 이러한 동작 특성이 있는 경우, 내부 전류로 인해서 플런져가 초기 위치로 복귀하는데 어려움이 있다. 때문에 구동 시퀸스를 구성해 지연각을 제어하는 회로를 구성하는 것이 좋다.
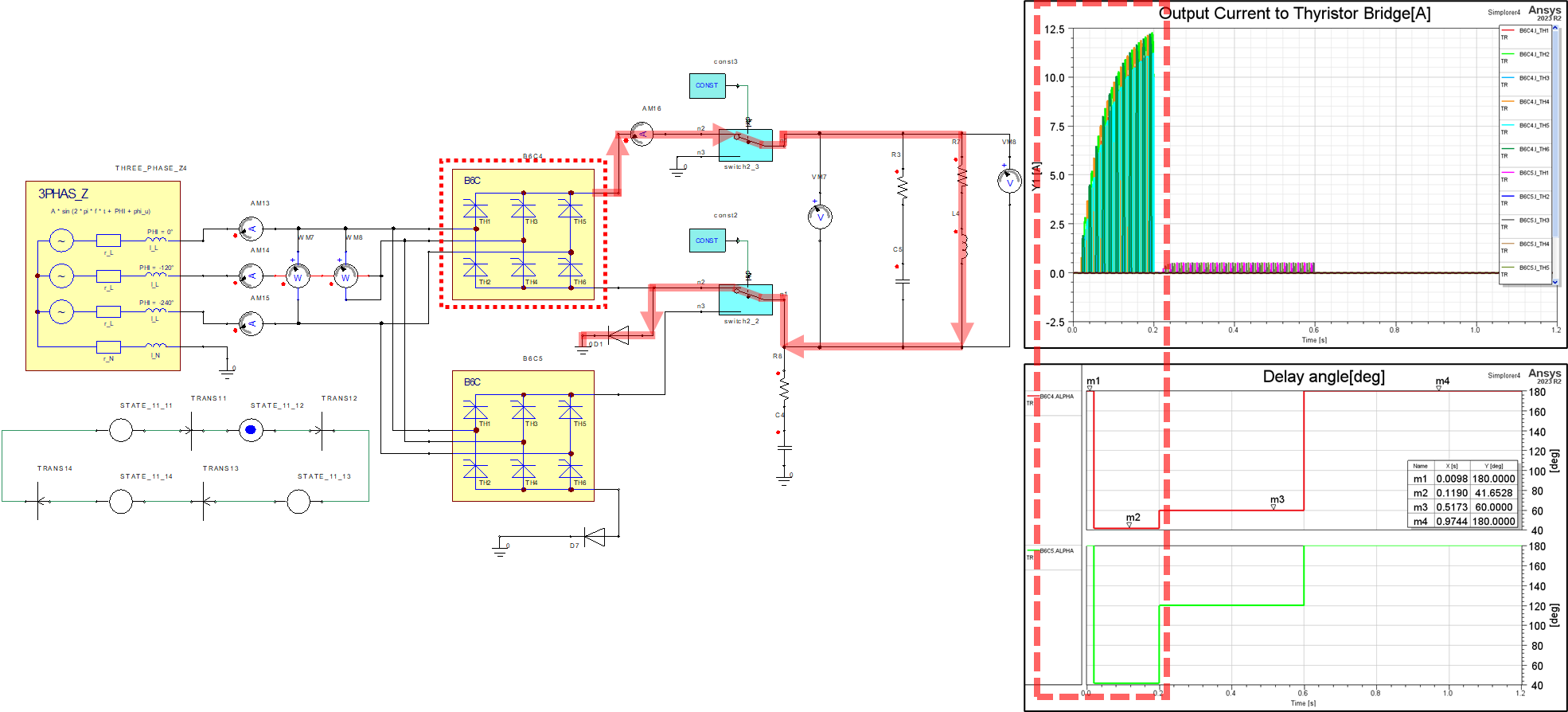
[그림 14] 초기 구동용 싸이리스터 회로
[그림 14]은 싸이리스터 브릿지 위상 제어(Delay Angle)로 각 Thyristor 소자의 점호 시점을 조절하여 출력 전압을 제어하기 위한 회로이다. 이때 점호 시점을 나타내는 각도를 지연각(Delay Angle, α)이라고 한다. 지연각이 작을수록 Thyristor가 더 이른 시점에 도통하게 되므로 출력 전압과 전류가 증가하고, 반대로 지연각이 증가하면 출력 전압이 감소하게 된다. 우측 상단 그래프는 Thyristor Bridge에서 출력되는 전류 변화를 나타낸 것이다. 초기 구동 단계에서는 지연각이 작게 설정되어 높은 전류가 공급되며, 이를 통해 솔레노이드 코일에 필요한 구동 전류를 빠르게 형성할 수 있다. 시간이 지남에 따라 지연각이 변화하면서 출력 전류가 점차 감소하는 것을 확인할 수 있다. 이러한 특성은 위상 제어 정류기의 전형적인 동작 특성을 보여준다.
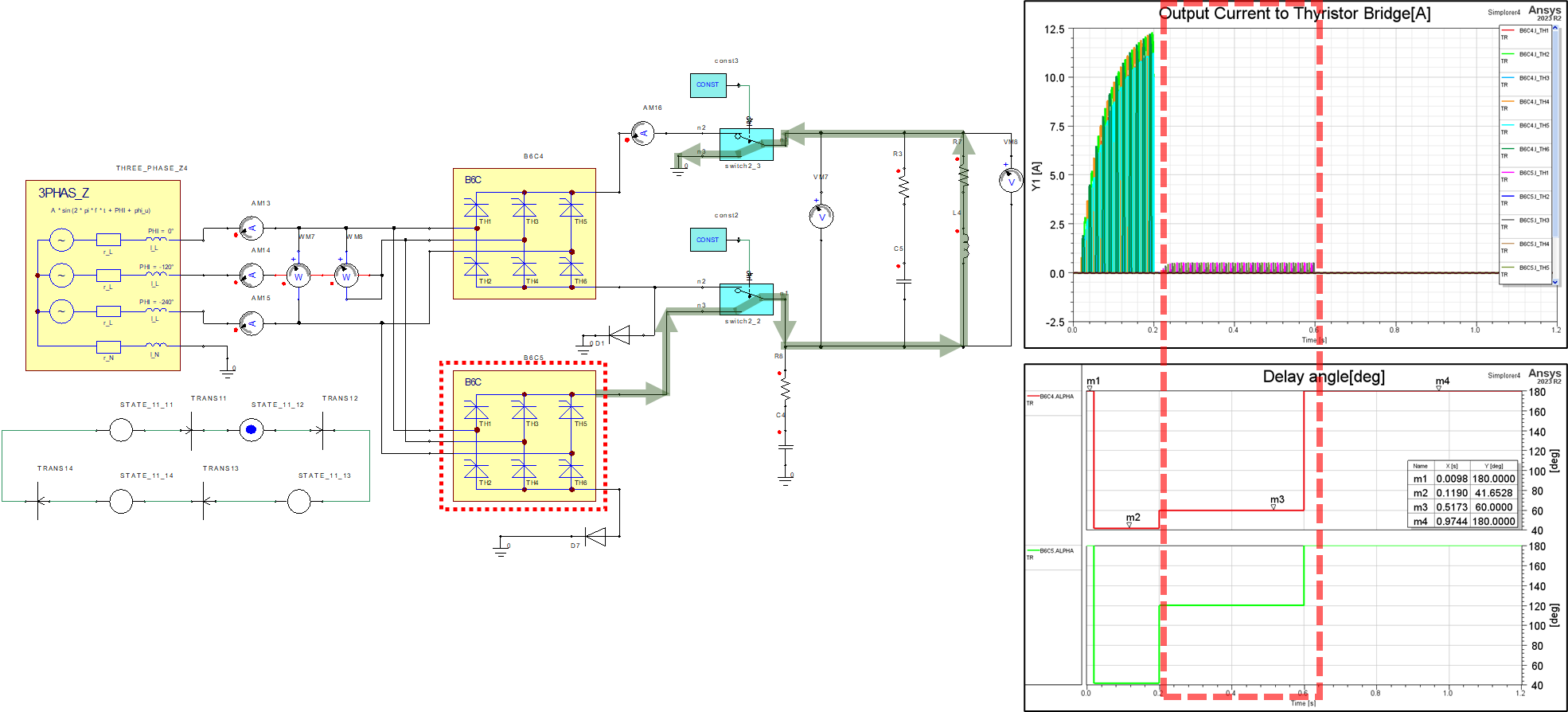
[그림 15] Closing 구동용 싸이리스터 회로
[그림 15]는 플런져가 최종 위치에 도달했다는 가정하에, 초기 위치로 복원하는 시점에 상부 사이리스터의 지연각을 180도로 변경시켜 인가 전압을 0으로 바꾸고, 하부 사이리스터 회로로 스위칭 시켜 코일에 인가되는 전류의 방향을 반대로 흐르도록 구성된 회로이다. 스위칭 소자를 활용해서 시퀸스를 제어한 것이다.
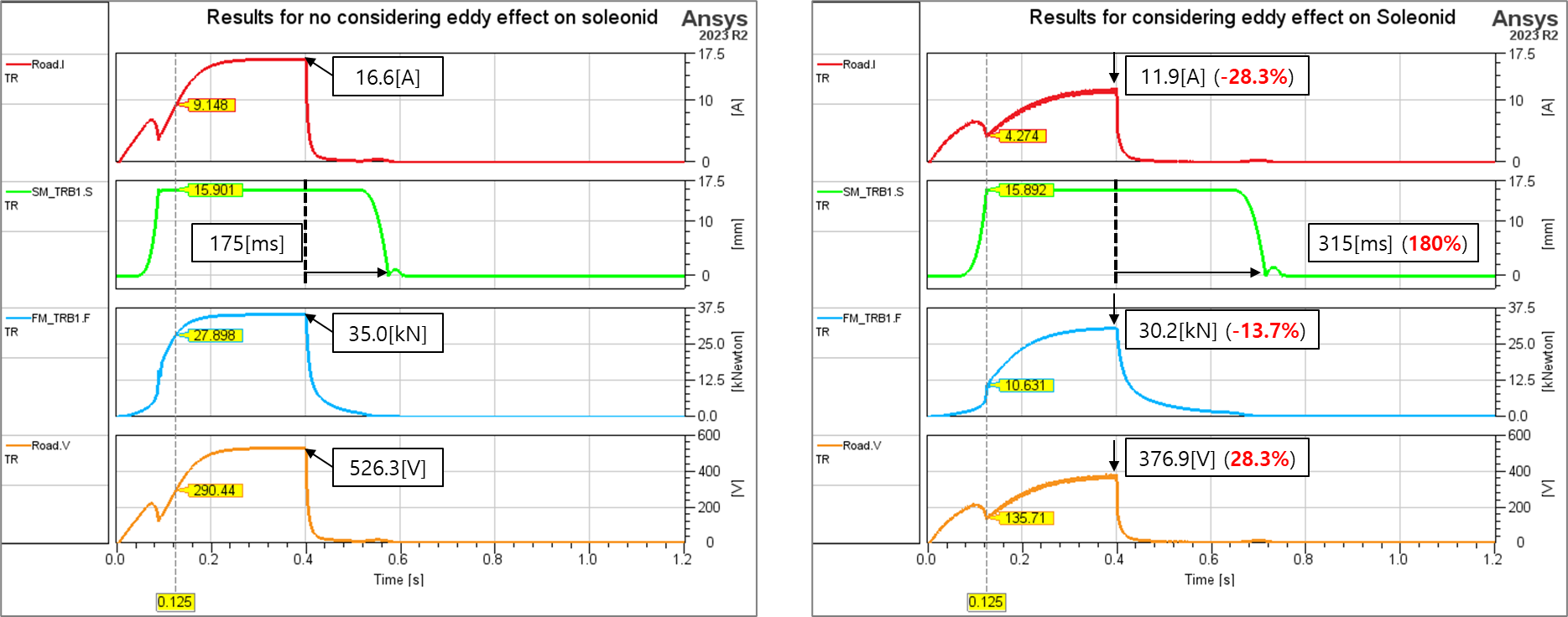
[그림 16] 구동 시퀸스별 해석 결과 데이터
이제 완성된 싸이리스터 브릿지 회로를 활용해서 와전류(Eddy Current) 효과가 반영된 해석을 확인해 보자. [그림 16]는 솔레노이드 내부에서 발생하는 와전류(Eddy Current) 효과를 고려하지 않은 경우와 고려한 경우의 시스템 동작 특성을 비교한 결과를 나타낸다. 분석 결과는 전류, 변위, 전자기력, 전압의 네 가지 물리량에 대해 시간에 따른 응답 특성을 비교하여 나타냈다. 좌측 그래프는 와전류 효과를 고려하지 않은 이상적인 모델 결과이며, 우측 그래프는 솔레노이드 내부의 도전성 구조에서 발생하는 와전류를 포함하여 해석한 결과를 나타낸다. 첫 번째 그래프는 솔레노이드 권선에 흐르는 전류를 나타낸다. 와전류를 고려하지 않은 경우 최대 전류는 약 16.6 A 수준까지 상승하는 것으로 나타났다. 반면 와전류를 고려한 경우에는 최대 전류가 11.9 A 수준으로 감소하여 약 28.3 % 감소하는 결과를 보였다. 이는 솔레노이드 주변 금속 구조에서 발생하는 와전류가 자기장 변화를 방해하는 자기 감쇠 효과(Magnetic Damping)를 발생시키기 때문이다. 와전류는 렌츠의 법칙(Lenz's Law)에 따라 원래 자기장의 변화를 억제하는 방향으로 생성되며, 결과적으로 권선에 인가되는 전류 상승을 지연시키는 효과를 유발한다. 두 번째 그래프는 플런저의 변위를 나타낸다. 와전류 효과를 고려하지 않은 경우 플런저가 목표 위치에 도달하는 시간은 약 175 ms로 나타났다. 그러나 와전류를 고려한 경우에는 플런저 이동 시간이 315 ms로 증가하여 약 80 % 이상 증가하는 결과를 보였다. 이는 전자기력이 감소하면서 플런저를 가속시키는 힘이 줄어들기 때문이다. 세번째 그래프는 솔레노이드에서 발생하는 전자기력을 나타낸다. 와전류를 고려하지 않은 경우 최대 전자기력은 약 35.0 kN 수준으로 나타났지만, 와전류를 고려한 경우 최대 전자기력은 30.2 kN으로 감소하였다. 이는 약 13.7 % 감소한 결과이다. 전자기력 감소 역시 와전류로 인해 자기장이 약화되는 효과에 기인한다. 마지막 그래프는 솔레노이드 시스템에 인가되는 전압을 나타낸다. 와전류를 고려하지 않은 경우 최대 전압은 약 526.3 V 수준으로 나타났으나, 와전류를 고려한 경우 376.9 V 수준으로 감소하였다. 이는 약 28.3 % 감소한 결과이다. 이러한 결과는 와전류가 전기적 에너지 전달 과정에도 영향을 미친다는 것을 보여준다.
결론
원자로 제어봉 구동장치(CEDM)의 자석잭 구동 특성을 분석하기 위해 Ansys Maxwell과 Simplorer를 연성한 Co-Simulation 기반 해석 모델을 구축하였다. 전자기 해석, 전력전자 회로 해석, 그리고 기계 동역학 모델을 통합함으로써 실제 제어봉 구동 시스템에서 발생하는 복합적인 물리 현상을 동시에 고려할 수 있도록 하였다. 먼저 Maxwell 전자기 해석을 통해 솔레노이드 코일 전류에 따른 전자기력 발생 특성과 플런저의 이동 특성을 분석하였다. 해석 결과 코일 전류가 증가할수록 전자기력이 증가하며, 플런저가 코어 방향으로 이동하면서 공극이 감소함에 따라 자기 회로의 자기 저항(Reluctance)이 감소하여 전자기력이 급격히 증가하는 특성이 확인되었다. 이러한 결과는 솔레노이드 구동 시스템에서 전류 크기가 구동 성능을 결정하는 중요한 설계 요소임을 보여준다. 다음으로 Simplorer를 이용하여 전력전자 구동 회로를 모델링하고 Maxwell 전자기 모델과 Co-Simulation을 수행하였다. 초기에는 Transistor 기반 PWM 스위칭 회로를 이용하여 솔레노이드 구동 특성을 분석하였다. PWM 제어를 통해 코일 전류를 조절할 수 있으며, 스너버 회로의 커패시터 용량 변화에 따라 전류 과도 응답 특성이 달라지는 것을 확인하였다. 특히 커패시터 용량이 증가할수록 스위칭 시 발생하는 전류 진동이 감소하는 경향을 보였다. 그러나 PWM 기반 구동 회로에서는 코일에 저장된 자기 에너지로 인해 전류가 완전히 차단되지 않고 일정 시간 동안 잔류 전류가 흐르게 되며, 이로 인해 플런저가 초기 위치로 복귀하는 과정에서 제약이 발생할 수 있다. 이러한 문제를 해결하기 위해 Thyristor Bridge 기반 위상 제어 정류 회로를 적용한 전력 구동 시스템을 구성하였다. Thyristor 기반 구동 회로에서는 지연각(Delay Angle)을 제어하여 출력 전압과 전류를 조절할 수 있으며, 이를 통해 초기 구동 시 높은 전류를 공급하고 이후 전류를 감소시키는 구동 시퀀스를 구성할 수 있다. 또한 하부 Thyristor Bridge를 이용하여 코일 전류의 방향을 반대로 흐르게 함으로써 플런저 복귀 동작을 보다 안정적으로 구현할 수 있도록 하였다.
맺음말
본 원고에서는 자석잭 방식 원자로 제어봉 구동장치의 전자기 구동 특성을 분석하기 위해 Ansys Maxwell과 Simplorer를 이용한 Co-Simulation 기반 해석 방법을 소개하였다. 전자기 해석과 전력전자 회로, 그리고 기계 동역학 모델을 통합함으로써 실제 제어봉 구동 시스템의 복합적인 동작 특성을 효과적으로 분석할 수 있었다. 특히 Thyristor Bridge 기반 위상 제어 정류 회로를 적용함으로써 솔레노이드 구동 시스템의 전류 제어 특성과 플런저 구동 동작을 보다 현실적으로 모사할 수 있었다. 또한 와전류 효과를 포함한 해석을 통해 실제 시스템에서 발생할 수 있는 전자기적 손실과 응답 특성 변화를 정량적으로 확인할 수 있었다. 이러한 Maxwell–Simplorer Co-Simulation 기반 접근 방법은 원자로 제어봉 구동장치와 같이 전자기 구동, 전력전자 회로, 기계 동역학이 동시에 작용하는 시스템의 설계 및 성능 분석에 매우 효과적인 해석 방법이라 할 수 있다. 향후 이러한 해석 방법은 다양한 전자기 구동 장치의 설계 검증 및 성능 최적화 과정에서 유용하게 활용될 것으로 기대된다.
좋아요이 원고가 마음에 든다면 하트를 꾸욱!



 ㈜태성에스엔이
㈜태성에스엔이-
- 대표이사 : 심진욱, 박인규
- 사업자등록번호 : 219-81-23192
- 통신판매업 신고번호 : 제2017-서울성동-1100호
ⓒ TAE SUNG S&E Inc.



