
ANZINE : CAE 기술 매거진
이전 ANZINE Home Tech-Insight



Ansys Rocky-Motion 연성해석을 통한 달 탐사 차량의 거동 제어 구현
- 김재원 매니저
- 태성에스엔이
- jwkim21@tsne.co.kr
Ansys Rocky-Motion 연성해석을 통한 달 탐사 차량의 거동 제어 구현
Introduction
최근 국내외에서 달 탐사용 이동형 로봇인 Rover 개발에 대한 관심이 높아지고 있다. 달 탐사용 Rover의 주행 성능을 검토하기 위해서는 지구와 다른 중력 조건과 월면토의 입자 거동을 함께 고려해야 한다. 특히 월면토는 일반 지반과 다른 접촉 및 거동을 보이므로, 실제 시험만으로 주행 안정성과 구동 성능을 평가하기 어렵다. 본 원고에서는 입자 해석 프로그램인 Ansys Rocky™(이하 Rocky)와 다물체 동역학 프로그램인 Ansys Motion™(이하 Motion)을 활용하여 월면토 기반 Rover 주행 거동을 해석적으로 구현하는 프로세스를 소개한다.
[그림 1] 달 탐사용 Rover 장비
■ 달의 토양 입자 구현 및 물성 검증
본 해석에서는 월면토 모사체인 GRC-1을 대상으로 입자 물성을 정의하고, DEM 기반 입자 해석 프로그램인 Rocky를 이용하여 안식각 및 콘 관입 시험을 모사하였다. GRC-1의 입자 물성은 아래 표와 같이 입력하였다.
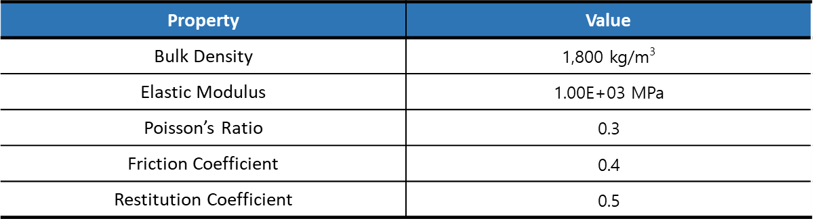
[그림 2] 월면토 모사체(GRC-1) 물성
Rocky에서는 실제 입자 형상을 STL 파일로 불러와 사용할 수 있고 기본적으로 지원하는 여러 입자의 형상이 있으나, 본 해석에서는 계산 효율을 고려하여 구형 입자로 대체하였다. 다만 구형 입자는 실제 비구형 입자에 비해 회전 저항이 작게 나타날 수 있으므로, Rolling Resistance 계수를 적용하여 회전 거동을 보정하였다.
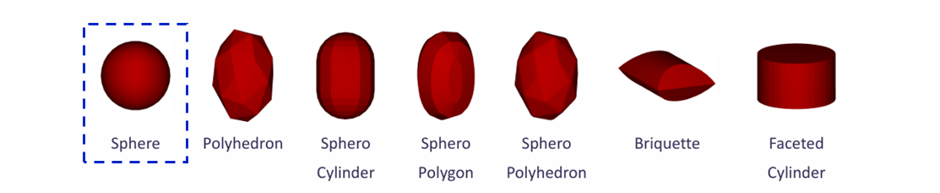
[그림 3] Rocky에서 기본적으로 지원하는 입자 형상
본 해석에서는 입자 물성 검증에 널리 사용되는 안식각 시험을 기준으로 Rolling Resistance 값을 조정하였다. 안식각 시험 중 고정 깔대기법은 평판 위에 입자를 투하한 뒤 입자가 쌓이며 형성하는 경사각을 측정하는 방식이다. 본 원고에서는 여러 안식각 시험이 있지만 고정 깔대기법을 적용하였으며, 참조 논문에서 보고된 GRC-1의 안식각 30°를 목푯값으로 설정하였다.
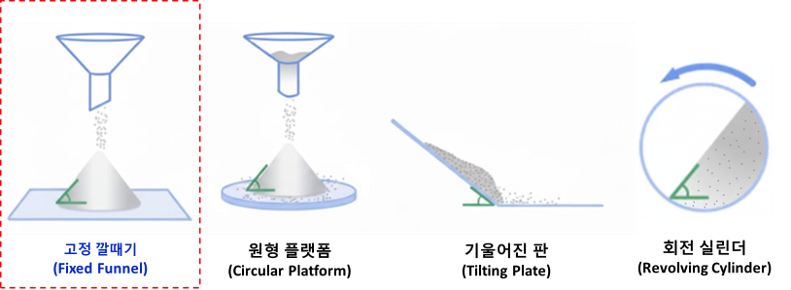
[그림 4] 안식각 측정 방법(예시)
Rolling Resistance 수치를 변경해 가며 안식각 30°를 기준으로 보정한 결과, Rolling Resistance 0.3 조건에서 목표 안식각과 가장 유사한 결과를 얻었다. 따라서 이후 해석에서는 해당 값을 구형 입자의 회전 저항 보정 계수로 적용하였다.
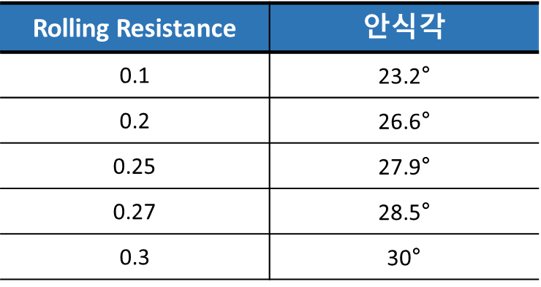
[그림 5] Rolling Resistance에 따른 안식각 측정값
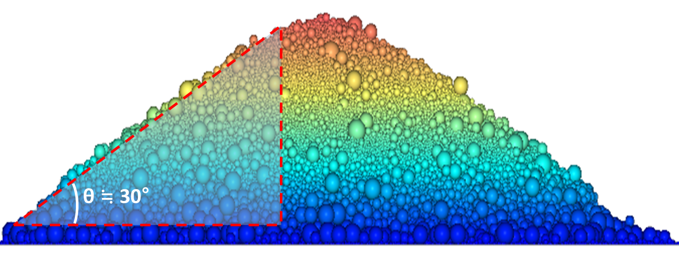
[그림 6] 회전 저항 보정 계수가 적용된 안식각 측정
또한, 보정된 입자 물성의 적정성을 추가 검토하기 위해 콘 관입 시험을 모사하였다. 콘 관입 시험이란 지반의 압력을 확인하기 위해 탐침을 하는 시험이다. 본 해석에서는 Soil Bin과 Cone을 구성하여 탐침 깊이에 따른 압력 변화를 확인하였다.
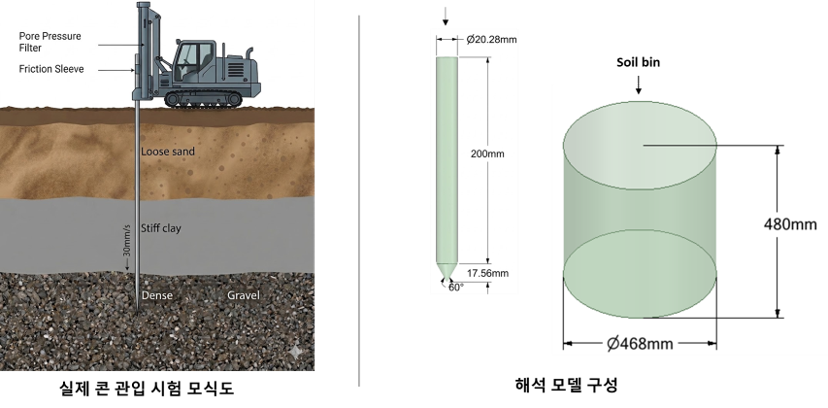
[그림 7] 콘 관입 시험 모식도 및 해석 모델
Cone을 30 mm/s의 속도로 하강시킨 뒤 탐침 깊이에 따른 압력 변화를 시험 결과와 비교하였다. 해석 결과는 시험과 유사하게 탐침 깊이가 증가할수록 압력이 상승하는 경향을 보였다. 이를 통해 안식각 시험으로 보정한 입자 물성이 콘 관입 조건에서도 월면토 지반의 저항 특성을 일정 수준 유사함을 확인하였다.
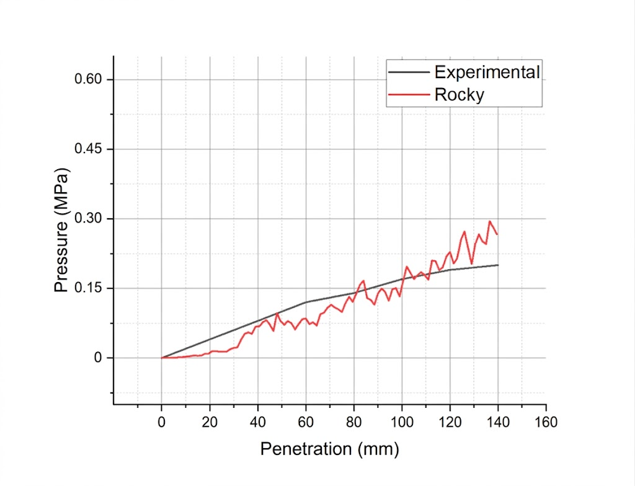
[그림 8] 관입 압력 비교 그래프
■ Rocky-Motion 연성 해석 프로세스
앞서 정의한 GRC-1 월면토 모델을 기반으로, Rover가 월면토 위에서 주행할 때의 거동을 확인하기 위해 Rocky-Motion 연성 해석 환경을 구성하였다.
Rocky는 DEM 기반으로 월면토 입자의 거동과 바퀴-입자 간 접촉 반력을 계산한다. Motion은 Rover의 차체, 바퀴, 조인트, 구동 조건을 포함한 다물체 동역학 모델을 계산한다. 즉, Rocky에서 계산된 접촉 반력은 Motion으로 전달되고, Motion에서 계산된 Rover의 위치와 자세 정보는 다시 Rocky로 전달되는 방식으로 입자 지반과 Rover 구조물의 상호작용을 고려하였다.
[그림 9] Rocky/Motion 상관관계
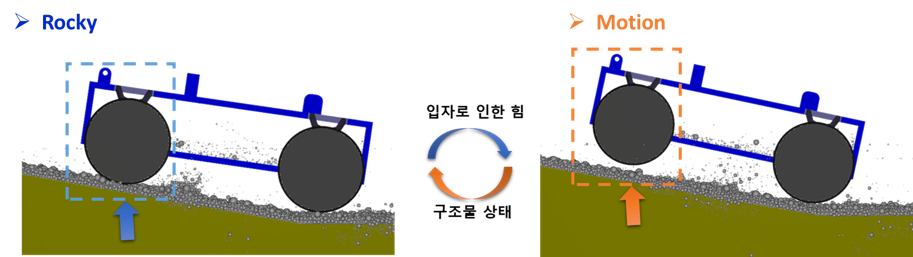
Rocky 단독 해석으로도 입자 거동과 입자-구조물 접촉은 평가할 수 있다. 그러나 Rover의 조인트, 구동 조건, 차체 자세 변화와 같은 다물체 동역학 거동을 정밀하게 정의하기에는 한계가 있다. 따라서 본 해석에서는 Motion에서 Rover MBD 모델을 구성하고, Rocky에서 월면토와 바퀴 간 접촉 반력을 계산하는 연성 해석 방식을 적용하였다.
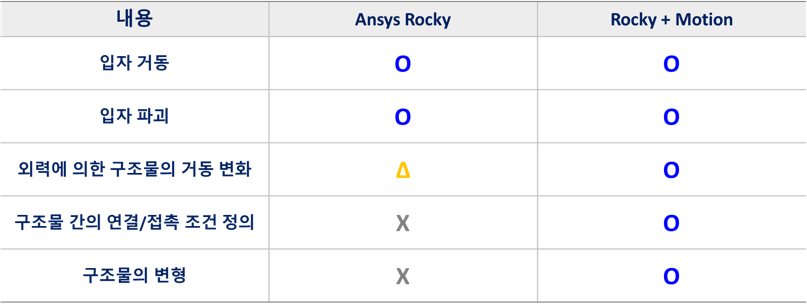
[그림 10] Rocky/Motion Coupling – Capability
■ FMI 기반 연성 해석 구성
본 해석에서는 FMI(Functional Mock-up Interface) 방식을 이용하여 Rocky와 Motion을 연성하였다. 연성 해석에서 Rocky는 Master 역할을 수행하고, Motion은 Slave 역할을 수행한다. Rocky는 해석 중 각 Body에 작용하는 입자 접촉 반력의 총합을 Motion으로 전달하며, Motion은 해당 하중을 기반으로 계산한 각 Body의 위치 및 자세 정보를 Rocky로 전달한다.
모델 구성은 Motion에서 Rover의 다물체 동역학 모델을 정의한 뒤, 연성 해석에 필요한 Body를 선택하여 FMU 파일로 Export하는 순서로 진행하였다. 생성된 FMU 파일을 Rocky에서 불러오면 Motion에서 정의한 Rover 모델이 Rocky 해석 환경 내에서 월면토 입자와 상호작용할 수 있다.
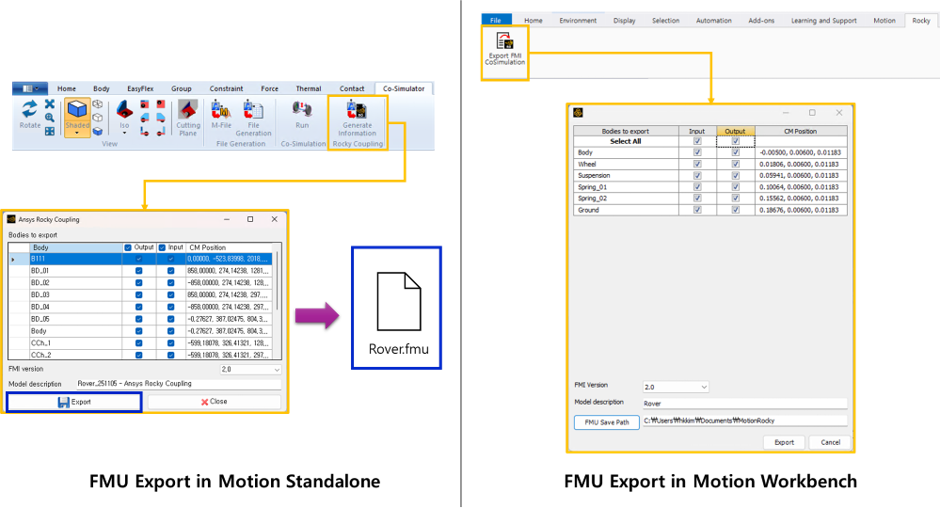
[그림 11] FMU 파일 추출 방법
■ Rover 주행 모델 구성
Rover 주행 모델은 월면토 입자가 적층된 바닥면과 Rover 모델로 구성하였다. Rover의 질량은 약 230 kg으로 설정하였고, 주행 영역은 약 4,400 mm × 2,400 mm 크기로 구성하였다. 또한 경사면 등반 조건을 확인하기 위해 바닥면에는 약 9.6°의 경사를 적용하였다. 달 환경을 모사하기 위해 중력 가속도는 지구 중력의 약 1/6 수준인 1.635 m/s²로 설정하였다.
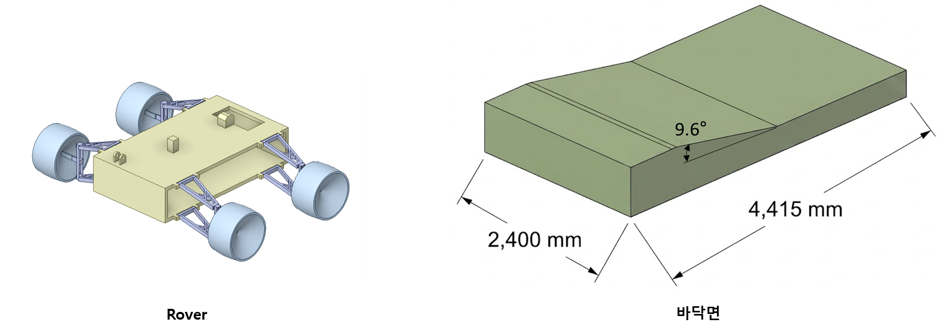
[그림 12] Rover 거동 확인을 위한 모델 구성
Rocky 해석 모델에서는 입자를 두 개의 Layer로 구성하였다. 상부 Layer는 Rover 바퀴와 직접 접촉하는 영역이므로 입자의 회전을 활성화하였다. 하부 Layer는 충분히 퇴적되어 입자의 회전이 제한된 지반층으로 가정하고 회전을 비활성화하였다. 이를 통해 전체 입자 수를 효율적으로 관리하면서, Rover의 실질적 거동 확인을 위해 Rover와 직접 접촉하는 주요 영역에서는 입자의 회전 거동을 고려할 수 있도록 구성하였다.
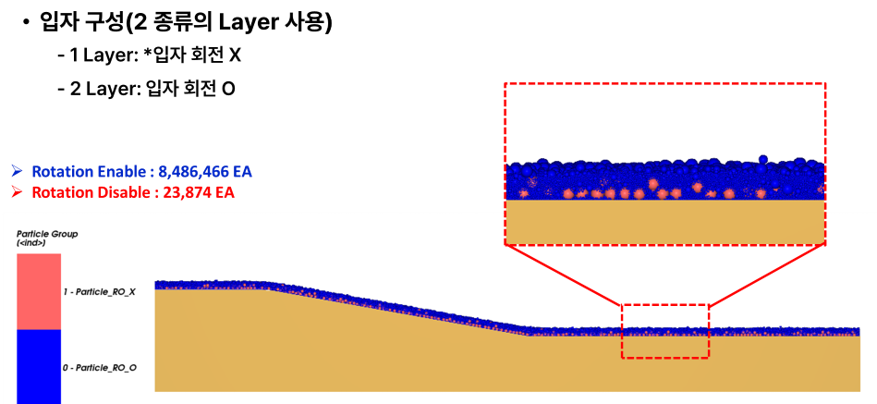
[그림 13] 바닥면 입자 구성
■ Rover 구동 제어 조건
Rover의 주행 조건은 단순 일정 토크 입력이 아니라, 목표 회전 속도를 유지하기 위한 P 제어 방식으로 구성하였다. 제어 변수는 현재 바퀴 회전 속도, 목표 회전 속도, Gain 값으로 구성되며, 현재 속도와 목표 속도의 차이를 이용하여 필요한 토크를 계산한다. 본 해석에서는 네 개의 바퀴에 동일한 제어 알고리즘을 적용하되, 각 바퀴의 접촉 상태와 지반 반력에 따라 서로 다른 토크 응답이 나타날 수 있도록 하였다.
적용한 제어 함수는 다음과 같은 개념으로 구성된다.
def cal_Torque(Rotational_Velocity, Target_Velocity, Gain):
error = Rotational_Velocity - Target_Velocity
torque = -error * Gain
return torque
위 함수에서 현재 회전 속도가 목표 회전 속도보다 낮으면 양의 토크가 발생하고, 목표보다 높으면 음의 토크가 발생하여 목표 속도에 수렴하도록 제어된다. 본 해석에서는 목표 회전 속도를 10 rad/s로 설정하였으며, Motion 내부에서 Python 코드를 Import한 뒤 Function Expression을 이용하여 각 바퀴의 구동 조건에 해당 제어 함수를 적용하였다.
■ Rover 거동 해석 결과
Rocky-Motion 연성 해석을 통해 Rover가 월면토 위의 경사로를 등반하는 거동을 확인하였다. 해석 결과, 설정된 P 제어 로직에 의해 Rover는 목표 회전 속도를 유지하며 경사면을 주행하였다. 이 과정에서 Rocky는 바퀴와 입자 사이의 접촉 반력을 계산하고, Motion은 해당 반력을 기반으로 Rover의 위치, 자세, 바퀴 회전 속도 및 토크 응답을 계산하였다.
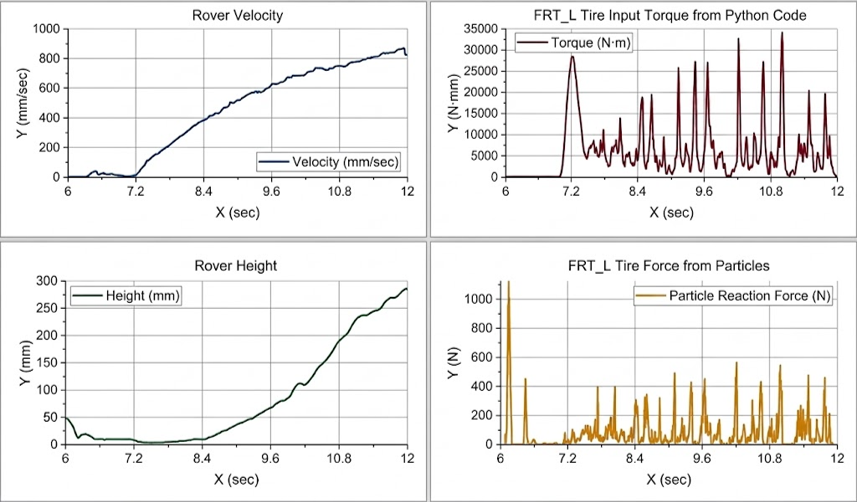
[그림 14] Motion에서 확인 가능한 결과(예시)
해석 결과, 바퀴별 반력은 동일하지 않았다. 이는 각 바퀴가 접촉하는 입자 수, 입자 크기, 입자 분포, 지반 상태가 시간에 따라 달라지기 때문이다. 따라서 불균일한 월면토 지반을 주행하는 Rover에서는 단순한 동일 토크 입력보다 바퀴별 접촉 상태를 고려한 독립 제어가 중요할 수 있다.
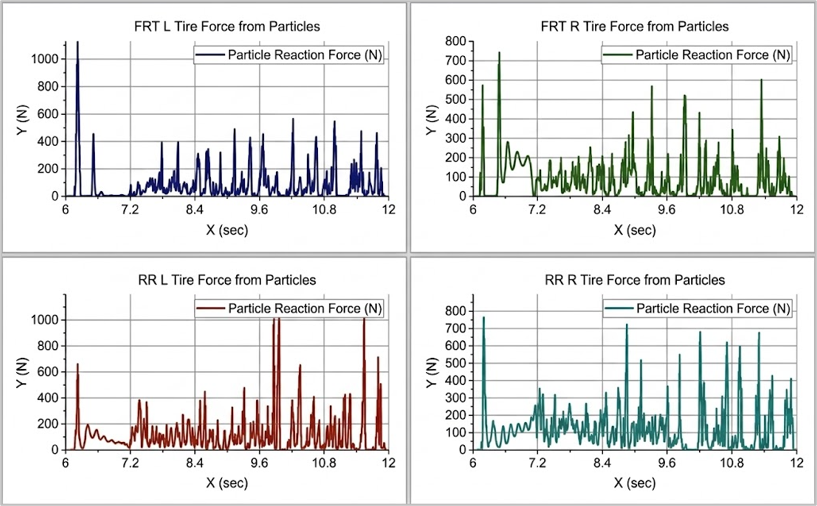
[그림 15] 바퀴별 반력 결과
바퀴별 토크 결과에서도 네 개의 바퀴에 동일한 제어 알고리즘을 적용했음에도 각 바퀴의 토크 응답은 서로 다른 양상을 보였다. 이는 동일한 목표 회전 속도를 유지하더라도 바퀴별 접촉 조건에 따라 요구 토크가 달라질 수 있음을 의미한다.
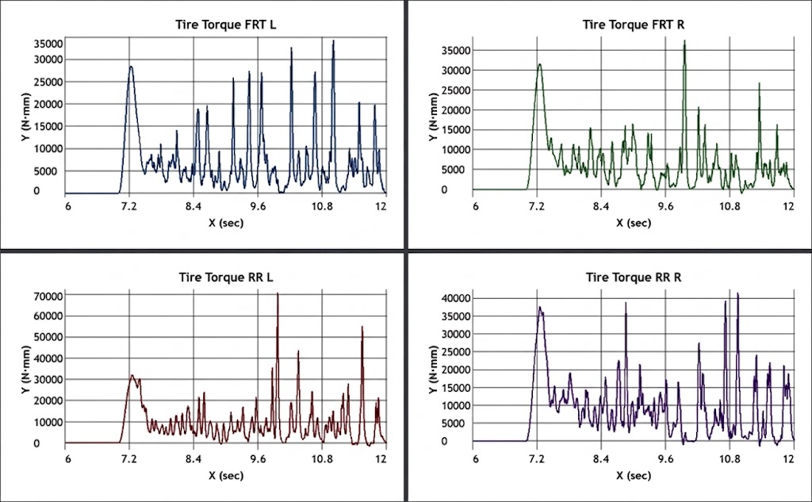
[그림 16] 바퀴별 토크 결과
바퀴 회전 속도 결과에서는 네 바퀴가 목표 회전 속도인 10 rad/s에 수렴하는 경향을 확인하였다. 이는 적용된 P 제어 조건이 해석 모델 내에서 정상적으로 작동하고 있음을 의미한다. 다만 본 해석은 제어 알고리즘의 기본 적용 가능성을 확인하기 위한 단계이므로, 실제 Rover 제어 성능을 정량적으로 평가하기 위해서는 주행 거리, 주행 속도, 소비 토크, 등판 가능 각도 등의 추가 평가 지표를 함께 검토할 필요가 있다.
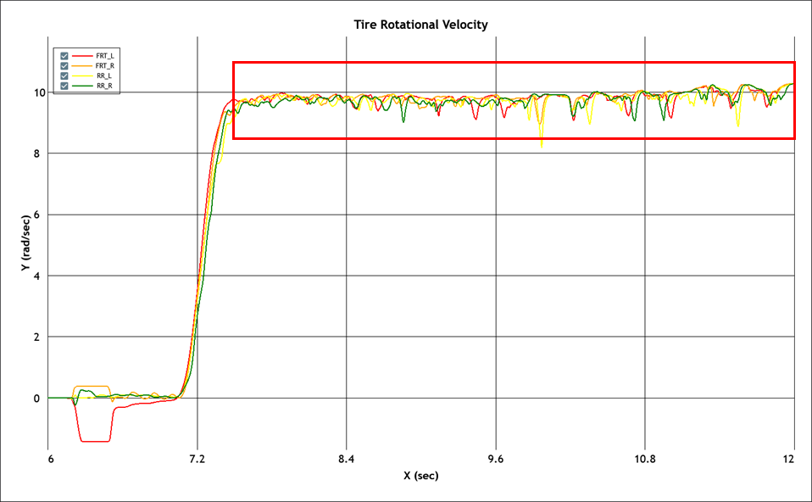
[그림 17] 바퀴별 회전 속도 결과
맺음말
본 원고에서는 Rocky와 Motion을 활용하여 월면토 기반 Rover 주행 거동을 해석적으로 구현하는 프로세스를 소개하였다. Rocky에서는 GRC-1 월면토 모사체의 입자 물성을 정의하고, 안식각 및 콘 관입 시험을 통해 물성의 적정성을 검토하였다. 이후 Motion에서 구성한 Rover MBD 모델을 FMU 형태로 Rocky와 연성하여, 월면토 위 경사로 주행 조건에서 바퀴별 하중, 토크, 회전 속도 응답을 확인하였다.
해석 결과, 동일한 제어 조건을 적용하더라도 바퀴별 접촉 상태에 따라 하중과 토크 응답이 다르게 나타났다. 이는 달 탐사용 Rover와 같이 불균일한 입자 지반 위를 주행하는 시스템에서 DEM-MBD 연성 해석이 유용하게 활용될 수 있음을 보여준다.
향후에는 본 해석 프로세스를 기반으로 다양한 바퀴 형상, 주행 속도, 경사각, 중력 조건, 입자 물성 조건에 대한 민감도 분석을 수행할 수 있다. 또한 Slip Ratio, Sinkage, Traction Force 등의 지표를 추가로 평가한다면 달 탐사용 Rover의 구동 성능과 주행 안정성을 보다 정량적으로 검토할 수 있다.
■ 참고 자료
관련자료
![[Tae Sung Tech Summit 2021] 타이어 성능 평가를 위한 Mechanical 및 ROCKY 활용 방안](/storage/upload/data/thumbnail/TSTS_2021.png)
![[2022년 세미나] Rocky DEM – Ansys Motion(동역학) 연성해석을 이용한 입자 거동 해석 - 입자거동해석 트렌드 및 연성해석 사례 세미나](/storage/upload/data/thumbnail/1703226853_eQugnkQdCMcyYPRMO05MIaCe49JVz1kX3or0wBBp.png)



 ㈜태성에스엔이
㈜태성에스엔이-
- 대표이사 : 심진욱, 박인규
- 사업자등록번호 : 219-81-23192
- 통신판매업 신고번호 : 제2017-서울성동-1100호
ⓒ TAE SUNG S&E Inc.



